К.т.н Степанец А.В., Коропова
Л.А.
Национальный
технический университет Украины «Киевский политехнический институт»
Регулятор
с самоподстройкой для управления уровнем воды в барабане котлоагрегата
Барабанные котлоагрегаты ТЭЦ, ТЭС и котельных, как объекты управления, являются очень сложным технологическими установками. Одним из важнейших контуров управления котла является контур регулирования уровня воды в барабане. Объект регулирования — квазистационарный, его параметры могут изменятся в зависимости от режима работы, кроме этого на него действуют большое количество контролируемых и неконтролируемых возмущений, в том числе другие контуры управления [1, 2].
Для улучшения качества работы предложено использовать
самонастраивающуюся систему [3] на основе эталонной модели. Динамическая модель
системы (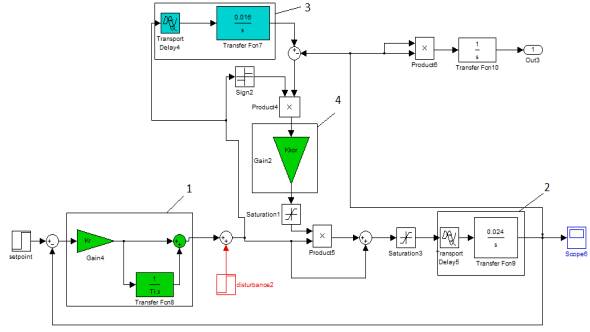 Рис.
1)
реализована в среде Simulink с успользованием математического аппарата
передаточных функций. В состав модели входят:
ПИ регулятор 1; объект управления 2, параметры которого
могут изменяться
Рис.
1)
реализована в среде Simulink с успользованием математического аппарата
передаточных функций. В состав модели входят:
ПИ регулятор 1; объект управления 2, параметры которого
могут изменяться ![]() ; модель объекта управления 3, по которой был
настроен регулятор; блок настройки 4 в
виде пропорционального звена
; модель объекта управления 3, по которой был
настроен регулятор; блок настройки 4 в
виде пропорционального звена ![]() .
.
Если модель объекта достаточно точно описывает динамику объекта, то на вход блока самонастройки поступает сигнал, близкий к нулевому, так как входы сумматора, сравнивающего выходные сигналы объекта и модели, имеют почти одинаковые числовые значения. Поэтому выход регулятора не будет корректироваться выходным сигналом блока настройки (работает в проектном режиме). При изменении параметров объекта управления на выходе сумматора появится некий полезный сигнал, который приведет к коррекции сигнала управления регулятора.
 Рис. 1.
Модель для исследования систем с самонастройкой и встроенной моделью
Рис. 1.
Модель для исследования систем с самонастройкой и встроенной моделью
Очевидно, что на результирующие переходные процессы будут
влиять выбор значения параметра ![]() блока самонастройки. Критерием, на который
настроены переходные процессы, является интегральный квадратичный критерий
качества, он же — целевая
функция для процедуры оптимизации, по которому избирается параметр
блока самонастройки. Критерием, на который
настроены переходные процессы, является интегральный квадратичный критерий
качества, он же — целевая
функция для процедуры оптимизации, по которому избирается параметр ![]() .
.
В исследовании использовалось предположение, что параметры
объекта управления (уровня воды в барабане котла) изменились на 50% от
номинальных. Результаты моделирования переходных процессов (рис. 2) при
различных режимах работы парового котла свидетельствуют, что традиционная
система автоматического регулирования (САР) имеет существенные недостатки,
связанные со значительным временем регулирования и первым отклонением. Поэтому
для совершенствования традиционной САР и повышения ее эффективности
предлагается использовать описанную выше систему с самонастройкой.
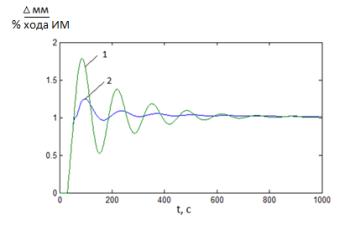
Рис. 2. Переходной процесс в системе без самонастройки (1) и в системе с самонастройкой (2) по каналу «задание-выход»
ВЫВОДЫ
В работе рассмотрен контур управления уровнем воды барабанного котла и предложена самоподстраивающаяся система управления, которая может значительно улучшить переходные процессы в условиях изменения параметров объекта управления. Система построена на коррекции сигнала с выхода регулятора, где параметр корректора определяется методом оптимального параметрического синтеза. Длительность процесса самонастройки зависит от начального значения параметра корректора.
Литература:
1. Плетнев Г.П. Автоматизированное управление объектами
теплових електростанций: Учебн. пособие для вузов./ Г.П. Плетнев–
М.:Энергоиздат, 1981.-368с.,ил.
2. Клюев А.С. Наладка систем
автоматического регулирования барабанных паровых котлов / А.С. Клюев, А.Т.
Лебедев, С.И. Новиков. – М.: Энергоатомиздат, 1985. - 280с. 3. Бейнарович В.А. Самонастраивающиеся системы с эталонной моделью// Докл. Том. гос.
ун-та систем управления и радиоэлектроники. – 2008. –№ 1(17). – С. 67–69.