К.ф.- м. н. Раевская Л.Т.
Уральский государственный
лесотехнический университет, г. Екатеринбург
ОПРЕДЕЛЕНИЕ
РАЦИОНАЛЬНЫХ КОНСТРУКТИВНЫХ ПАРАМЕТРОВ ПОРШНЯ ПНЕВМОМОТОРА
В данной работе проведено
вычисление рациональных параметров опасного сечения поршня аксиально-поршневого
пневмомотора серии ДАР в области паза. Цель этого исследования – определение
таких параметров, которые привели бы к уменьшению изгибных деформаций стенок
поршня.
Преимущества аксиально-поршневых пневмодвигателей
типа ДАР: малые габариты на единицу мощности, пригодность для работы в тяжелых
эксплуатационных условиях (повышенные температуры, пыль, влажность, вибрация),
высокая безопасность работы позволяют использовать их в качестве приводов. Эти
двигатели по сравнению с радиально-поршневыми той же мощности имеют в
полтора-два раза меньшие габариты и массу [1]. Поршни двигателей серии ДАР
расположены параллельно оси ротора. На торцевые поверхности прикладывается
поочередно давление из газораспределительной магистрали. Около 80% отказов в
процессе эксплуатации двигателей серии ДАР происходят из-за трещин в стенках
поршня, появление которых связано с внецентренным растяжением – сжатием. Трещины при эксплуатации появляются в углах
паза. Конечно-элементная модель поршня пневмомотора ДАР-14М, построенная с
помощью программного комплекса ANSYS, представлена на рисунке 1. В центре поршня находится
паз, через который при эксплуатации движется ротор. На рисунке 1 видны также
отверстия под палец с роликом, обкатывающим ротор. Между опорами под палец –
ребро жесткости для уменьшения деформации изгиба. Ребро жесткости имеет вид трапеции (рис.2).
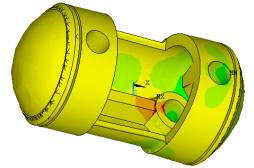
Рис.1. Поле напряжений в теле поршня Рис. 2. Опасное сечение поршня
В предыдущей работе по оптимизации
ребра жесткости поршня [2] были
приведены результаты аналитического
расчета размеров ребра жесткости без учета тела
поршня. Полученные результаты
показали сильную зависимость
величины нормального максимального напряжения в различных направлениях от параметров
ребра жесткости. В связи с
необходимостью уточнения изложенных в
статье [2] результатов в данной работе
проведен расчет параметров с учетом всего сечения поршня в области паза. Цель
этого исследования – подбор такого сечения ребра жесткости при сохранении его
массы и высоты, которое привело бы к уменьшению изгибных деформаций стенок поршня. На рисунке 2 показано
сечение поршня в той его части, где появляется наибольшая деформация изгиба в процессе
эксплуатации. Сечение можно представить, как составное из трапеции, сегмента и полукольца. Приняты
следующие обозначения: С1 – центр тяжести трапеции, С2 –
центр тяжести полукольца (центр тяжести сегмента не показан на рис.2), С – центр тяжести составного сечения, О –
точка, через которую проходит линия действия внешней силы Р (эта линия перпендикулярна плоскости сечения), Yc1–
координата центра тяжести трапеции, Yc2 – координата центра тяжести полукольца, Yс –
координата центра тяжести составного сечения, Yb – расстояние от нижнего основания трапеции до начала
отсчета, Хc –
центральная ось. Кроме того, приняты следующие обозначения: a – размер
верхнего основания трапеции, b – нижнего, высота трапеции – h; R, R1 –
больший и меньший радиусы полукольца, соответственно. Пусть S1, S2 , S3
– площади трапеции, полукольца и сегмента, соответственно.

![]() (1)
(1)
В данной работе пренебрегали
площадью сегмента в силу малости по сравнению с остальными площадями. Вместе с
тем, сегмент объединял отдельные площади в единое целое - сечение поршня. С целью увязать (в отсутствие площади
сегмента) точки окружности радиуса R1 и концы отрезка b составлены
необходимые соотношения
![]() ,
, ,
, . (2)
. (2)
Высота ребра жесткости
конструктивно не должна превышать 15 мм длясвободного движения ротора в двигателе ДАР-14М. Получаем для координаты центра тяжести составного сечения
следующее соотношение
 (3)
(3)
Воспользуемся
известными соотношениями для моментов инерции трапеции J1 и полукольца J2
относительно своих центров тяжести:
J1 = (h3/36)(a2+4ab+b2)/(a + b)
J2 = 0.110R4-0.110R14-0.283R2R12(R - R1)/(R + R1),
и с учетом соотношений (2), (3) получим выражение для
момента инерции полного сечения относительно общего центра тяжести
JX = J1 + S1(Yc1 - Yc)2 + J2 + S2(- Yc2 + Yc)2
;
Вычисленные
с учетом (3) моменты инерции сечения относительно центральных осей
подставлялись в формулу для нормального максимального напряжения при
внецентренном
растяжении-сжатии.
 ,
(4)
,
(4)
где Р
– величина результирующей силы, приложенной к сечению, линия действия которой
проходит через точку О (рис.2); yo-
координата точки приложения результирующей силы, y1- координата самой удаленной от нейтральной линии
точки сечения. Нейтральная линия расположена между центрами тяжестей частей
составного сечения и проходит ниже центральной оси. Далее ввиду громоздкости
выражения для нормального напряжения расчет проводился с помощью программы MAPLE 9.5. Прежде всего, было установлено, что нормальное
максимальное напряжение не имеет экстремума в заданной области изменения
параметров (рис.3) и, следовательно, надо минимизировать функцию. Для
проведения минимизации функции σ(a, b) в
качестве ограничения была выбрана связь между параметрами в виде a + b – 2S/h=0.
Рис 3. Зависимость σ от
параметров а, b
Это ограничение можно использовать для
любого типа двигателей ДАР. В частности, для
пневмомотора ДАР-14М эта
величина равна 2S/h=24 мм. Кроме
того, гораздо больший
вклад в напряжение σ дает второе
слагаемое в формуле (4), которое появляется из-за деформации
внецентренного растяжения - сжатия. Из рисунка 3 видно, что увеличение
параметра a (соответственно, в силу существующего ограничения
уменьшение b) приводит к уменьшению напряжения. Это объясняется
тем, что при условии постоянства площади сечения трапеции (ограничения на параметры) рост параметра a приближает центр тяжести сечения к точке приложения
силы P, тем самым, уменьшая плечо силы. Если параметры ребра
жесткости выбрать, например, а=20мм, b=4мм, то
уменьшение напряжения вдоль оси поршня составит 4-6%. С целью проверки этого
результата была построена расчетная модель, у которой были закреплены точки на
внутренней поверхности отверстия под палец с роликом с той стороны, где
прикладывается внешняя нагрузка в виде давления на торец поршня. Статический
расчет показал, что для двух наборов параметров: a = 8 мм, b = 16 мм (существующие в настоящее время параметры ребра
жесткости); a = 20 мм, b = 4 мм, действительно уменьшение нормального
максимального напряжения вдоль оси поршня
составляло 4% , что подтверждает точность теоретического расчета. Вместе
с тем, следует отметить, что в программном комплексе ANSYS были вычислены
напряжения во всех узлах конечных элементов. И для напряжений вдоль оси
У, перпендикулярной к оси поршня в некоторых узлах уменьшение напряжения
достигало 17-20 %. Таким образом, можно предполагать, что существуют более
рациональные параметры ребра жесткости, которые позволяют уменьшить изгибное
напряжение и как следствие – отказы поршня.
Библиографический
список
1. Яшин
А.Н., Анкудинов Д.Т. Машины и оборудование для горнодобывающей промышленности и
строительства. Уральский лесотехнический институт, Екатеринбург, с.77, 1992г.
2. Раевская Л.Т. Оптимизация ребра
жесткости поршня пневмомотора /Л.Т.Раевская/ Известия вузов. Горный журнал, №6,
2008.- С. 90-94.