Tехнические науки/ Авиация и космонавтика
Nickolay Zosimovych1, Anatoly Voytsytskyy2
1Tecnólogico
de Monterrey (Campus Gualajara, Mexico)
2Zhytomyr National
Agrarian and Ecological University (Zhytomyr, Ukraine)
DISTURBED MOTION OF THE LAUNCH VEHICLE WITH
INTEGRATED GPS/INS NAVIGATION SYSTEMS
In these article has been conducted a presimulation analysis
of disturbed motion of the launch vehicle with integrated GPS/INS navigation
systems. It was determined the main characteristics describing the internal structure of vehicle.
Key
words: Integrated GPS/INS
navigation systems, gimbaled inertial navigation system (GINS),
GPS receiver, launch vehicle, mathematical model (MM), thrust,
propulsion, deviation.
Introduction. A key tendency in the development of
affordable modern navigation systems is
displayed by the use of integrated GPS/INS navigation systems consisting of a gimbaled inertial navigation system (GINS) and a multichannel GPS receiver [1]. The investigations show [2, 3], that such systems of navigation
sensors with their relatively low
cost are able to provide the required accuracy of navigation for a wide class of
highly maneuverable objects, such as airplanes,
helicopters, airborne precision-guided weapons,
spacecraft, launch vehicles and recoverable orbital carriers.
Let us briefly examine the scientific and
technical problems arising when making the corresponding models
and algorithms.
MM of spatial motion of center of
mass and relative to center of
mass of a solid launch vehicle is
well known and widely described
in sources. The greatest difficulty in the implementation of such a model as a part of the model of
the environment, represents a model of a solid-propellant rocket engine with thrust distribution in
respect to the nominal model in
mind and the model of stage separation
from the point of view of the influence
of disturbing moments that arise when dividing into initial conditions of the motion of the next stage.
Task Statement. Let's consider the above objectives,
having regard to peculiarities of the subject of inquiry, namely a commercial
launch vehicle, designed to launch payloads into
low Earth orbit (LEO) or geostationary orbit
(GSO), in more details.

Fig. 1. Launch vehicle Vega (Vettore
Europeo di Generazione Avanzata, ASI&ESA) [4]
Within the framework
of this study we shall consider a light launch vehicle which has been jointly
developed by the European Space Agency (ESA) and the Italian Space Agency (ASI)
since 1998 (Fig.1). It is qualified to launch
satellites ranging from 300 kg to 2000 kg into low circular polar orbits. As a rule,
these are low cost projects conducted by research organizations and universities
monitoring the Earth in scientific missions as well as spy satellites,
scientific and amateur satellites. The
launch vehicle Vega [4] is the prototype of the vehicle under development.
The planned payload to
be delivered by the launch vehicle to a polar orbit at an altitude of ~700 km
shall be 1500 kg. The launch vehicle is
tailored for missions to low Earth and Sun-synchronous orbits. During the first
mission the light class launch vehicle is to launch the main payload, a
satellite weighing 400 kg, to an altitude of 1450 km with an inclination of the
orbit 71.500. Unlike most single-body launchers, this vehicle is to
launch several spacecraft.
In order
to make a model for disturbed motion of the above mathematical model shall be supplemented with
mathematical models of the following
disturbing factors:
· thrust
distribution in the propulsion system in respect to nominal thrust profile;
· manufacturing defects of structure and assembly
components;
· variations of atmospheric parameters and wind fields.
Let's cconsider a model of each of these factors
in detail.
A model of thrust distribution in the propulsion system. As mentioned above, nominal
profiles of thrust in vacuum and the nominal mass flow rate of the propellant specified in a table are used when
calculating a thrust. In addition to the nominal profile of
thrust and propellant mass flow the performance
of propulsion system accompanies the
product with profiles of the
so-called "upper" and
"lower" thrust with relevant profiles of
propellant mass flow and of the center of gravity
of the fuel solid-block (Fig.2).
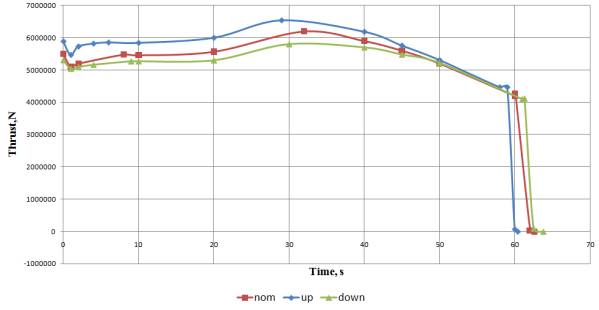
Fig. 2.
Profiles of propellant mass flow
These profiles characterize variation of
the burning rate of the
fuel solid-block depending on the specific chemical composition of the propellant, atmospheric
conditions, location of the fuel solid-block inside the
propulsion system, etc.
In order to make
a model of thrust distribution we may apply deterministic,
stochastic and minimax approaches. Proceeding from the physical aspect of the factor discussed we applied the
stochastic approach in this paper [5] based on the following.
The distribution
of thrust was considered as a uniformly distributed random variable in the range ![]() with -1 corresponding to the
"lower" thrust, 0 being
the nominal profile and +1 being the "upper"
thrust. This random
variable is implemented for each
engine of the launch vehicle only one time before the simulation hereafter the profile of real thrust
as well as of mass consumption and
of the center of the fuel solid-block shall be constructed
based on the Chebyshev polynomials approximation and used similarly as in the calculation of traction, weight and
control moments of the launch vehicle.
with -1 corresponding to the
"lower" thrust, 0 being
the nominal profile and +1 being the "upper"
thrust. This random
variable is implemented for each
engine of the launch vehicle only one time before the simulation hereafter the profile of real thrust
as well as of mass consumption and
of the center of the fuel solid-block shall be constructed
based on the Chebyshev polynomials approximation and used similarly as in the calculation of traction, weight and
control moments of the launch vehicle.
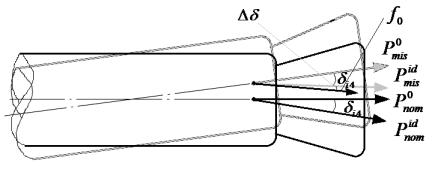
Fig. 3. Engine deviations and
deflection angles of the nozzles
in development tests (failure tests) of control inputs: ![]() is a sum of
forces acting upon the launch vehicle;
is a sum of
forces acting upon the launch vehicle; ![]() is an ideal
nominal thrust of the propulsion system;
is an ideal
nominal thrust of the propulsion system; ![]() is nominal thrust of the propulsion system in vacuum
environment;
is nominal thrust of the propulsion system in vacuum
environment; ![]() is a
«disturbed» ideal thrust;
is a
«disturbed» ideal thrust; ![]() is «disturbed»
thrust in vacuum environment;
is «disturbed»
thrust in vacuum environment; ![]() is engine
«deviation» of the launch vehicle;
is engine
«deviation» of the launch vehicle; ![]() is deflection
angle of the nozzles consequent on
testing and correction of control signals
is deflection
angle of the nozzles consequent on
testing and correction of control signals
The line of thrust
shall be determined in the body-fixed frame and depend on the orientation of
the longitudinal axis of the nozzle relative to the longitudinal axis of the
launcher engine. When considering the undisturbed motion of the launch vehicle,
engine angles shall be regarded as nominal and the direction is determined only
by the deflection angles of the nozzles consequent on testing and correction of
control signals (Fig. 3). When considering the disturbed motion of the launch
vehicle, the line of thrust shall be determined on account of errors in the
assembly of the launch vehicle, engine deviations and errors in testing and
correction of controlling influence. Let's consider errors in the assembly of
the launch vehicle and engine deviations closer.
Manufacture defects of structure
and assembly components of the launch vehicle. As
already mentioned, when considering the undisturbed motion the launch vehicle
shall be considered as ideally assembled, i.e. axes of
the structure members coinсide, there is
no displacement between the
members, etc. In a real situation assembly errors are inevitable along reasonable length of the launch
vehicle which leads to a change in the
moments of inertia of the launch vehicle, the center of mass,
and most importantly, a change in the
thrust line.
To describe this
disturbing factor let's consider the launch vehicle as a combination of
components that make it up (a nose cone, a satellite with a bus, the fourth
stage engine pack, a control bay, the third stage block, the second stage block, the first stage boosters) [5]. Each of these
components has its mass and inertial characteristics (depending on
the change in its mass. The moment of inertia, the center of block mass are set
by designers of the launch vehicle) in an ideally bound coordinate system.
In addition, each
component is characterized by the coordinates of points of its anchorage with
the adjacent components and assembly errors, given in the form of the tilt
-related coordinate system relative to the adjacent structural component [5].
This error is considered normally expected corresponding to the nominal
arrangement of components and variance set by designers of the launch vehicle
[6] (Fig. 4).
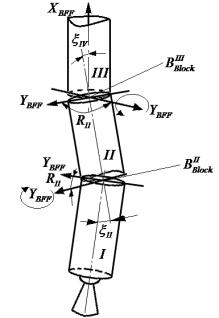
Fig. 4. Errors
in the assembly of![]() stages in a bound
coordinate system
stages in a bound
coordinate system
So, for example, errors in the assembly of the
third stage block relative the
control unit are characterized by incidental orientation angles.
![]()
Usually assembly begins with the control unit because it includes a measuring
unit and a gyroplatform implementing inertial reference frame and measuring the
orientation angles of the launch vehicle [5]. Further units shall be docked up and down the
launch vehicle subject to specific error
values in the assembly of the
launch vehicle. Thus, the center of mass
and moments of inertia shall be
recalculated in the bound reference frame. Besides,
there shall be calculated deflection angles of the nozzles of the launch vehicle and arms of thrust forces required in the calculation of moments.
A model of variations of atmospheric parameters and wind fields. As is known, the
aerodynamic forces acting on the launch vehicle are in particular dependent on
the atmospheric parameters (density, pressure, temperature). These parameters,
in their turn, depend on the altitude and geographic latitude, time and season,
the parameters of solar activity and other factors.
To calculate
trajectories and conduct other studies we should use standard atmosphere (SA)
tables while designing a launch vehicle. They give some average parameters for
tranquil atmosphere depending on the height [6-8]. Deviations of
the atmospheric parameters from the standard values, as well as wind are
atmospheric disturbances which are taken into consideration when one studies
the disturbed motion of the launch vehicle.
To solve the problems of
flight dynamics, we also need to know the range of possible deviations of these
parameters corresponding to a certain level of probability in addition to
standard values of atmospheric parameters both excluding seasons
and locations on the globe, and taking them into account. In addition, more
accurate research requires knowledge of the statistical relationships between
the random deviations of each parameter at different heights, etc.
There are various
methods describing disturbance of atmospheric parameters. In the present paper,
we shall use the canonical expansion method for random components of
atmospheric parameters [9]. The substance of the method is as follows. The
temperature ![]() and the density of the atmosphere
and the density of the atmosphere ![]() can be represented in the following way [10]:
can be represented in the following way [10]:
![]()
where ![]() are standard
values of the temperature and the density ;
are standard
values of the temperature and the density ;
![]() is deviation
from the standard temperature;
is deviation
from the standard temperature;
![]() is a relative
deviation from the standard air density.
is a relative
deviation from the standard air density.
In order to set
random functions ![]() and
and ![]() we shall use
the canonical expansion method [11].
we shall use
the canonical expansion method [11].
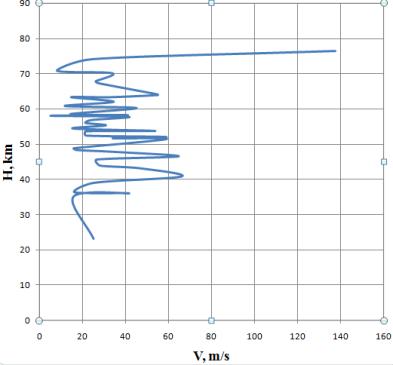
Fig. 5. Mean values of the zonal wind component in Guam (processing of the results by the author based upon the data obtained by 9 meteorological rockets during the period between 3rd and 25th September, 1958) [12]
With reference to the case under consideration, the atmospheric
parameters as random functions of
height of a point above the
Earth's surface are represented as canonical expansion as follows:
![]()

where ![]()
![]() are mean deviations from the values of standard atmosphere corresponding to the point in question;
are mean deviations from the values of standard atmosphere corresponding to the point in question;
![]()
![]() are some nonrandom deviation from the mean deviations
are some nonrandom deviation from the mean deviations ![]() and
and ![]()
Wind effect is taken into account in changing airspeed vector. Thus,
taking into account the effects of wind
air vector shall be written as:
![]()
where ![]() is an air vector
in undisturbed motion;
is an air vector
in undisturbed motion; ![]() is a gust velocity vector.
is a gust velocity vector.
Wind shall be considered horizontal, i.e. without vertical movement of air masses,
and the absolute velocity depends on the altitude and geographical
coordinates of the point, and the direction is characterized by azimuth angle - i.e. wind direction relative
to the north.
The absolute
value of the wind speed is
determined by approximating of
the profiles of wind velocity that
are set apriori (Fig. 5), and the azimuth angle is
a random variable normally distributed with mean corresponding to the nominal direction of the wind variance given by the
Customer:
![]()
CONCLUSIONS
1. Based on the above, we have set a technical problem of the conceptual
design of an integrated navigation system for the space launch vehicle qualified to inject small artificial Earth satellites into low and medium circular orbits.
2. We have made an analysis of possible models of flight and navigation measurements and identified
key potential difficulties in the process of their creation.
References
1.
Zosimovych Nickolay. Integrated Navigation System for Prompting of the
Commersial Carrier Rocket. Information technology Conference for Academia and
Professionals (ITC-AP 2013), Sharda University, India, 19-21 April, 2013.
2.
Flight instruments and navigation systems.
Politecnico di Milano - Dipartimento di Ingegneria Aerospaziale, Aircraft
systems (lecture notes), version 2004.
3. George M. Siouris.
Aerospace Avionics Systems. Academic Press, INC 1993.
4.
http://ru.wikipedia.org/wiki/ - Вега
(ракета-носитель).
5. Veniamin V. Malyshev, Michail N. Krasilshikov, Vladimir T. Bobronnikov,
Victor D. Dishel. Aerospace vehicle control, Moscow, 1996.
6. Furman T.T. Approximate Methods in Engineering Design, Vol. 155:
Mathematics in Science and Engineering, Edited by Richard Bellman, 1981.
7. CIRA 1972 (COSPAR International Reference Atmosphere 1972), Berlin,
1972.
8. ГОСТ 4401-64. Таблицы
стандартной атмосферы. Изд-во стандартов, Москва, 1964.
9. Carlo L. Botasso. Solution Procedures for Maneuvering Multibody Dynamics
Problems for Vehicle Models of Varying Complexity. Multibody Dynamics,
Computational Methods in Applied Sciences, Vol. 12, pp.57-79, 2008.
10. Steven A. Hildereth, Carl Ek. Long-Range Ballistic Missile Defence in
Europe. Congressional Research Service, RL34051, January 21, 2009.
11. Albertos P., and Sala A. Multivariable Control Systems, Valensia, Spain,
2004.
12. Матвеев Л.Т. Основы общей
метеорологии. Физика атмосферы. Л.: Гидрометеоиздат, 1965, 867 с.