Математика/2. Перспективы систем
информатики
,
Действительный
член, профессор Российской Академии Естествознания (РАЕ), Почетный доктор наук (РАЕ),
Заслуженный работник науки и образования,
к.т.н. ВАК РФ, доц. ВАК РФ. Буянкин
В.М.
Московский
Государственный технический университет
имени. Н.Э. Баумана, Россия
Заслуженный работник науки и образования (
РАЕ), кан. физ-мат. наук ВАК РФ.
Ковалева С.К.
РНЦ
” Курчатовский институт”
Разработка
системы подчиненного нейрорегулирования для многоконтурных электроприводов
Введение
В современных системах управления сложными техническими объектами (электроприводами) широко используются обратные связи с наличием нескольких контуров, количество которых соответствует количеству контролируемых параметров, таких как ток, напряжение якоря, скорость вращения двигателя и др. На входе регулятора каждого из контуров сравниваются сигналы, пропорциональные заданному и действительному значениям выходной величины данного контура, а выходное напряжение регулятора служит сдающим сигналом для последующего контура. Системы, построенные по такому принципу, называют системами подчиненного регулирования. Однако наличие большого количества нелинейных характеристик в электроприводах снижает точность и качество работы подчиненных систем управления. Поэтому для устранения этих недостатков целесообразно разрабатывать нейрорегуляторы с нейроподчиненным управлением.
Метод
решения проблемы
Каждый внутренний контур подлежит оптимизации, т. е. такому выбору
параметров нейрорегулятора, при котором удовлетворяется заданное качество
регулирования. Нейрорегуляторы как правило представляют собой ПИ и ПИД
последовательные цифровые корректирующие звенья. Передаточная функция
нейрорегулятора определяется структурой и параметрами соответствующего звена
объекта регулирования[1]. Алгоритм двухконтурной нейроадаптивной системы управления для электропривода представлена
на рис. 1. В системе нейроподчиненного регулирования оптимизация контуров
производится последовательно. Под оптимизацией понимается компенсация
наибольшей постоянной времени объекта регулирования, что приводит к повышению
быстродействия, улучшению статических и динамических характеристик работы
контура. Такая оптимизация идет последовательно от первого контура ко второму.
Эталонные модели с желаемыми характеристиками
настраиваются на модульный и
симметричный критерии.
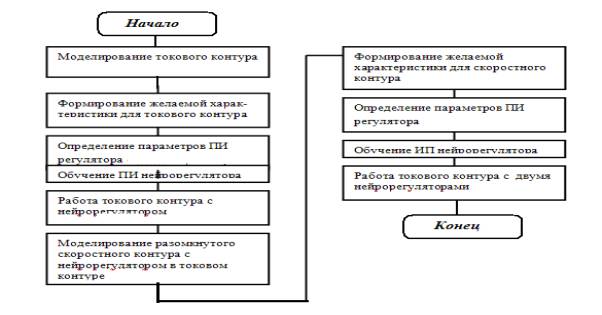
Рис. 1. Блок- схема
программы
для двухконтурного
электропривода с блоком
нейрорегулирования
.
При оптимизации первого контура
используется ПИ-нейрорегулятор.
Функциональная схема ПИ-нейрорегулятор представлена на рис. 2. При
оптимизации для второго контура
используется ПИД-нейрорегулятор. Функциональная схема ПИД-нейрорегулятор
представлена на рис. 3.
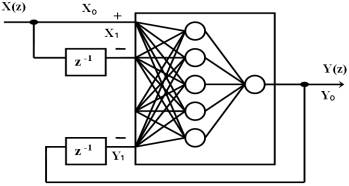
Рис. 2. Функциональная схема ПИ-нейрорегулятора 1
Система уравнений, описывающая процессы в ПИ-нейрорегуляторе имеет вид:
![]() Входной сигнал нейронной сети, задержанный на 1
такт,
Входной сигнал нейронной сети, задержанный на 1
такт,
![]() Выходной сигналы
нейронной сети, задержанный на 1 такт,
Выходной сигналы
нейронной сети, задержанный на 1 такт,
 Уравнения 1-го выходного слоя нейронов,
Уравнения 1-го выходного слоя нейронов,
 Уравнения 2-го выходного слоя нейронов,
Уравнения 2-го выходного слоя нейронов,
(1)
где ![]() - входной и выходной сигнал нейронной сети;
- входной и выходной сигнал нейронной сети;
![]() - входной сигнал нейронной сети,
задержанный на один такт;
- входной сигнал нейронной сети,
задержанный на один такт;
![]() - выходной сигнал нейронной сети,
задержанный на один такт;
- выходной сигнал нейронной сети,
задержанный на один такт;
![]() - выходные сигналы первого слоя нейронов;
- выходные сигналы первого слоя нейронов; ![]() - веса первого слоя нейронов;
- веса первого слоя нейронов; ![]() - сигналы на выходе блоков активации первого слоя нейронов;
- сигналы на выходе блоков активации первого слоя нейронов; ![]() - сигнал на выходе второго слоя нейронов;
- сигнал на выходе второго слоя нейронов; ![]() - веса второго слоя нейронов;
- веса второго слоя нейронов; ![]() - линейная функция активации. Нейронная сеть содержит в
первом входном слое 5 нейронов с функцией активации
- линейная функция активации. Нейронная сеть содержит в
первом входном слое 5 нейронов с функцией активации ![]() и один нейрон на
выходе с функцией активации
и один нейрон на
выходе с функцией активации ![]() .
.
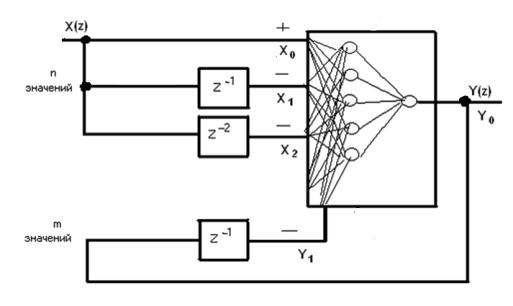
Рис. 3. ПИД-нейрорегулятор 2
Система уравнений, описывающая процессы в ПИД-нейрорегуляторе имеет вид:
 Уравнения 1-го выходного слоя нейронов
Уравнения 1-го выходного слоя нейронов
(2)
 Уравнения 2-го выходного слоя нейронов,
Уравнения 2-го выходного слоя нейронов,
Эталонные модели с желаемыми характеристиками настраиваются на модульный и симметричный оптимумы [1]. Двухконтурная нейроадаптивная система управления для электропривода
представлена на рис. 4.
Блок нейросамонастройки состоит из эталонных моделей с желаемыми характеристиками токового и скоростного контуров. Параметры электропривода сравниваются с данными эталонных моделей и в результате сравнения получаются данные для обучения нейрорегуляторов. На рис. 5 представлены переходные процессы работы электропривода с блоком нейросамонастойки, которые были смоделированы в среде МАТЛАБ.
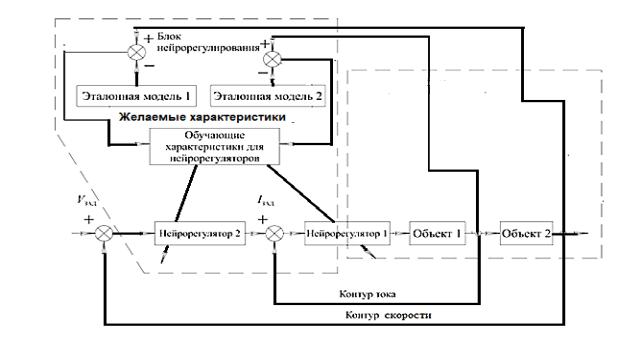
Рис.4. Двухконтурная нейроадаптивная система подчиненного управления электроприводом
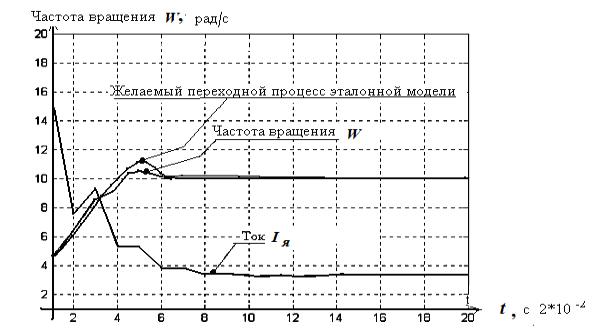
Рис. 5. Переходные процессы работы электропривода, смоделированные в среде МАТЛАБ
Выводы
По переходным процессам работы электропривода с нейророрегуляторами (рис.5) можно сделать заключение, что система управления в двухконтурном электроприводе, работающая по принципам нейроподчиненного регулирования, обеспечивает необходимые статические и динамические характеристики.
Список литературы
1.Слежановский О.В. и др. Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями. М, Энергоатомиздат,1983.
2. Буянкин В.М. Замена цифровых регуляторов на нейрорегуляторы с целью повышения качества управления электродвигателями Материалы 9- ой Международной научно-практической конференции “Наука и технологии: шаг в будущее 2014” Прага 2014г “Современный научный вестник” 21С.-35.
3. Буянкин В. М. Нейронные сети в управлении. Нейросетевые методы повышения эффективности систем управления сложными элементами электротехнических установок. ― Germany.: LAMBERN Academic Publishing , 2011. ― 300 с.
4. Буянкин В. М. Цифровое
управление электродвигателями. Микропроцессорный следящий электропривод. ― Germany. : LAMBERN
Academic Publishing Germany, 2012.
― 180 с.
5. Буянкин В. М. Курс цифровой
электроники (Компьютерный вариант
лекций, семинаров, лабораторных работ) http://www.
privodi.narod.ru. .2014-460 с.