УДК 621.316
А.М.Сиващенко, О.І.Штіфзон
Національний
технічний університет України «Київський політехнічний інститут», м.Київ
ДОСЛІДЖЕННЯ МАТЕМАТИЧНОЇ МОДЕЛІ НАСОСНОЇ СТАНЦІЇ
ПРИ ВИКОРИСТАННІ ЧАСТОТНОГО РЕГУЛЮВАННЯ
Анотація
Сиващенко
А.М., Штіфзон О.І. Дослідження математичної моделі насосної станції при
використанні частотного регулювання. В роботі розглядається насосна станція (НС), як об’єкт управління.
Розроблено експериментально-аналітичну модель динаміки ділянки стабілізації
натиску трубопроводу. Щоб задовольнити поставлені задачі, тобто підвищення
ефективності управління технологічним об’єктом за рахунок впровадження в
систему частотного перетворювача, коли він приймає участь в регулюванні витрати
рідини.
Ключові
слова: частотний
перетворювач, насосна станція, асинхронний двигун.
Загальна постановка проблеми.
Рішення
проблеми повної автоматизації об'єкта при роботі з мінімально необхідним
енергоспоживанням, підвищуючи при цьому якість транспортування рідин - ось
основне завдання, яке стоїть перед підприємствами і виробниками обладнання.
Для створення напору у системі транспортування
рідини використовуються насоси. В даний час у сфері транспортування рідин
найбільшого поширення набули відцентрові насоси. Для приводу насосів
використовуються переважно асинхронні двигуни з короткозамкнутим ротором. Насос
в сукупності з електроприводом і передавальним механізмом утворює насосний
агрегат (НА). Для забезпечення роботи одного або декількох НА в необхідному
режимі необхідний цілий комплекс обладнання: трубопроводи, запірна і регулююча
арматура, контрольно-вимірювальна апаратура, а також апаратура управління та
захисту. НА з необхідним обладнанням утворює насосну установку (НУ). Для
створення необхідного напору та забезпечення подачі найчастіше застосовують кілька
НУ, що працюють на загальну систему. Споруда, до складу якої входять одна або
кілька НУ, а також допоміжні системи та обладнання, побутові та виробничі
приміщення, що забезпечують працездатність в цілому, називається
насосною станцією (НС). В залежності від необхідної сумарної
характеристики НУ з'єднуються між собою або паралельно, або послідовно, або
змішаним чином.
В
переважній більшості випадків електроприводи насосних установок являються
нерегульованими, що не дозволяє забезпечити режим раціонального
енергозбереження і витрати води при зміні технологічних параметрах в широких
межах. Обрані, виходячи з максимальної продуктивності, ці механізми значну
частину часу працюють з меншою продуктивністю, що визначається зміною вимог в
різні періоди часу.
Існуючі
системи транспортування води з нерегульованим електроприводом не забезпечують
значного зниження споживаної потужності при зменшенні витрати, а також
обумовлюють значне збільшення тиску (напору) в системі, що призводить до витікання
води і погано відображається на роботі технологічного обладнання і мереж
транспортування рідини.
Для
досягнення поставлених цілей необхідно розв'язати такі задачі: проаналізувати існуючі системи регулювання;
розробити математичну модель насосної станції при використанні частотного
регулювання. запропонувати модернізовану схему регулювання натиску та витрати
води в насосній станції.
Аналіз відомих методів регулювання
Процес
зміни характеристики насоса для забезпечення заданої величини подачі
називається регулюванням. З відомих методів регулювання продуктивності насосних
агрегатів можна відокремити дві досить обширні групи:
а)
Регулювання при постійній швидкості обертання робочого колеса насоса, що
включає:
-
дроселювання заслінкою на стороні всмоктування;
-
впуск в всмоктуючи трубу повітря;
-
регулювання поворотом направляючих лопаток;
-
дроселювання напорною заслінкою.
б)
Регулювання при змінній швидкості обертання робочого колеса насоса, що включає:
-
з використанням електромагнітних муфт ковзання (без зміни швидкості обертання
двигуна);
-
з використанням асинхнорнного двигуна з живленням від джерела змінної частоти;
-
з використанням каскадних схем асинхронного двигуна.
В
діючих насосних станціях найбільш широке використання отримало регулювання
дроселюванням на загальному напорному колекторі шляхом впливу оператором на
управляючі ланцюги виконавчих механізмів (приводи засувок).
Дросельне
регулювання (Мал. 1). Дроселювання здійснюється засувкою, що знаходиться на
лінії натиску насоса. Засувка необхідна для від’єднання насоса від мережі в
період зупинки чи ремонту. Тому дросельне регулювання не потребує внесення в
систему установки насосу ніяких нових елементів, що являється основною перевагою
цього методу.
Кожному
положенню дросельної засувки відповідає нова характеристика мережі.
Мал. 1 – Регулювання продуктивності насоса
дроселюванням
Недолік
полягає у тому, що к. к. д. насосної установки, за рахунок додаткових втрат
натиску в прикритої засувки знижується. Регулювати подачу насоса засувкою на
всмоктую чому трубопроводі не рекомендується, так як до вказаного вище недоліку
додається ще більше пониження к. к. д. за рахунок пониження всмоктуючої
спроможності, відділення парів рідини та можливості кавітації.
Найбільш
раціональним є регулювання зміноючстоти обертання насоса[3], так як при цьому
к. к. д. вище і різко знижується споживана потужність. Найбільш часто
відцентрові насоси установлюються на одному валу з електродвигуном. Тому зміна
частоти обертання насоса пов’язано зі зміною частоти електродвигуна.
На
Мал. 2 показано положення характеристик натиску при регулюванні подачі зміною
частоти обертів робочого колеса насоса ![]() .
.
Мал. 2 – Регулювання продуктивності насоса зміною частоти оборотів.
Так
як положення засувки залишається незмінним, сумарний опір трубопроводу не
змінюється і положення і його характеристики залишаються попередніми. При зміні
частоти обертання робочого колеса точка робочого режиму А переміщується за
характеристикою Q-H, подача і натиск зменшуються. Змінювати частоту обертів має
сенс тільки до певної величини при якій натиск турбомеханізму стане рівним
статичному натиску. При подальшому зниженні продуктивності натиску, що
розвивається турбомеханізмом буде недостатньо, щоб визначити статичний напір в транспортній
мережі рідини. Потужність і к. к. д. можуть буи визначені з кривих потужностей
і к. к. д. за значеннями QА, QВ.
Дослідження математичної
моделі насосної станції
Модель насосної станції транспортування
води при використанні частотного регулювання обертами електродвигунів
(використовуючи частотний перетворювач) зображена на малюнку:
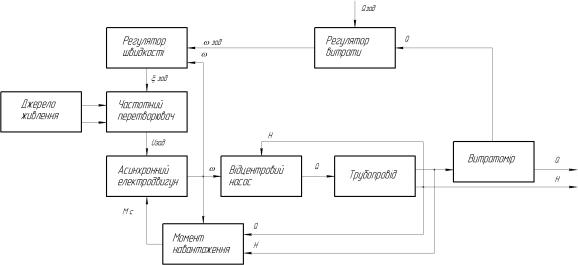
Мал. 3 – Модель насосної станції з каскадним
регулюванням по витраті
В наведеній вище моделі
використані позначення: Н – напір м, Q – витрата води м³/год , Qзад – завдання по витраті,
м³/год Мс – момент навантаження на валу двигуна кгс/м, ω – швидкість
обертання об/хв, ωзад –
задана швидкість обертання об/хв, Uзад
– сигнал з керування з частотного перетворювача В, ξ – щільність для ШІМ
(частотного перетворювача).
Для отримання динамічних характеристик об'єкту
необхідно отримати передавальні функції складників система регулювання насосної
станції — асинхронного електроприводу і відцентрового насоса.
Шукатимемо передавальну функцію асинхронного двигуна
як відношення частоти обертання ротора до частоти живлячої напруги. Розбиваємо
передавальну функцію на дві складових — «момент/частота» і «частота/момент» для
можливості обліку моменту опору, що діє на вал двигуна[2]. Тоді структурна
схема при управлінні частотою напруги статора виглядатиме так:
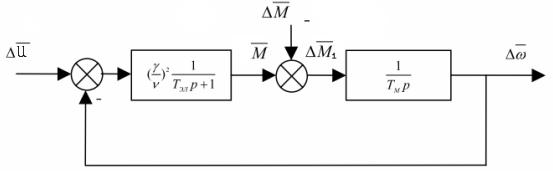
Мал. 4
Структурна схема асинхронного електродвигуна при управлінні живлячої напруги
де ΔU – управляюча
напруга, М- момент на валу, ΔМ- зворотный звязок по моменту, ΔМ1 –
момент з врахованим зворотнім звязком, Δω- частота .
По данній структурній схемі отримаємо передатну
функцію по керуючій дії в відносних одиницях:

де
ТМ — механічна постійна часу двигуна, ТЭМ —
електромагнітна постійна часу двигуна, у
= U1a/U1aн — відносна напруга статора (до номінального), υ = Ω1/Ω1н —
відносна частота напруги статора (до номінальної). Дана передавальна функція
справедлива для випадку, коли потокозчеплення статора є величина постійна,
тобто одночасно із зміною частоти живлячої напруги змінюється і його величина
відповідно до виразу: U1a/ω1 = const, що забезпечується в сучасних перетворювачах частоти.
Перетворимо (1):

Аналітичне знаходження параметрів передатної функції
двигуна вимагає наявність конструктивних і електричних параметрів двигуна. Проте,
параметри двигуна з часом експлуатації значно змінюються, тому доцільно
отримувати параметри передатної функції методами ідентифікації по кривій
розгону двигуна. Для передавальної функції вигляду(2) при холостому ходу для двигуна
А-400У-0,38/0,66-6У3 параметри були отримані експериментально і функція
прийняла вигляд:
 (3)
(3)
Момент опору буде моментом на валу крильчатки насоса і
буде збурювальною дією для двигуна.
Знайдемо
параметри функції (1) і перейдемо від відносних одиниць до абсолютних.
Обчислимо коефіцієнт ![]() , знаючи конструктивні
параметри двигуна і його режимні параметри. Згідно умові постійності потокозчеплення
статора, даний коефіцієнт буде постійним в будь-якому діапазоні зміни частот
живлячої напруги, тому достатньо знати параметри номінального режиму роботи
двигуна. Згідно з довідковими даними [23], даний двигун розрахований на напругу
6000В з частотою 50Гц. Так як у = U1a/U1aн
— відносна напруга статора (до
номінального), υ = Ω1/Ω1н — відносна частота напруги статора (до номінальної) тоді,
переходячи до абсолютних величин:
, знаючи конструктивні
параметри двигуна і його режимні параметри. Згідно умові постійності потокозчеплення
статора, даний коефіцієнт буде постійним в будь-якому діапазоні зміни частот
живлячої напруги, тому достатньо знати параметри номінального режиму роботи
двигуна. Згідно з довідковими даними [23], даний двигун розрахований на напругу
6000В з частотою 50Гц. Так як у = U1a/U1aн
— відносна напруга статора (до
номінального), υ = Ω1/Ω1н — відносна частота напруги статора (до номінальної) тоді,
переходячи до абсолютних величин:
 (4)
(4)
Виконуючи над (3) перетворення, зворотні перетворенням
у виразі (2) отримуємо:
 (5)
(5)
Введемо коефіцієнт посилення електродвигуна, який
характеризуватиме відповідність частоті обертання ротора в сталому режимі
частоті живлячої напруги. Згідно з довідковими даними, при частоті живлячої
напруги 50 Гц частота обертання ротора складає 1000 об/хв.
Як відомо:
 , (6)
, (6)
де
![]() ƒ-частота живлячої напруги Гц, р — число полюсів, s — ковзання %. В процесі роботи двигуна величина
ковзання змінюється, проте в стійкому режимі не перевищує 2-5%, тому для визначення
коефіцієнта посилення двигуна нею можна нехтувати. Тоді:
ƒ-частота живлячої напруги Гц, р — число полюсів, s — ковзання %. В процесі роботи двигуна величина
ковзання змінюється, проте в стійкому режимі не перевищує 2-5%, тому для визначення
коефіцієнта посилення двигуна нею можна нехтувати. Тоді:
 (7)
(7)
Механічна
характеристика насосного агрегату на робочій ділянці може бути описана
рівнянням[4]:
 (8)
(8)
де МС0 – момент опору в режимі холостого ходу; МС.ном –
моментопору при номінальній швидкості обертання; ωном – номінальна кутова
швидкість обертання.
При аналізі для насоса НМ 1250-260 було
прийнято:
![]() (9)
(9)
![]() (10)
(10)
Модель насоса відносно створюваного їм моменту опору в середовищі Simulink пакета MatLab представлена на Мал. 5.
Мал. 5 – Модель насосу відносно моменту опору
Характеристика напору отримана в результаті
апроксимації графіку заводської характеристики насосу НМ 1250-260 має вигляд:
![]() (11)
(11)
Модель насоса
відносно напору в середовищі Simulink пакета MatLab представлена на Мал. 6.
Мал. 6 – Модель насосу відносно напору
Характеристика
напору трубопроводу описується рівнянням:
![]() (12)
(12)
де 1,02 – коефіцієнт, що учитує надбавку на місцеві
опори в лінійній частині трубопроводу; hт – втрати напору на тертя, м; hзал –
залишковий натиск в кінці експлуатаційної ділянки.
В
моделі трубопроводу вихідним параметром є
продуктивність Q:
 (13)
(13)
Модель трубопровода в середовищі
Simulink
пакету MatLab
представлена на Мал. 7.
Мал. 7 – Модель трубопроводу
1. В роботі розглянуто насосну
станцію як об’єкт управління. Проаналізовано
стандартні рішення регулювання продуктивності насоса. Найбільш раціональним
обране рішення регулювання зміною частоти обертання
насоса.
2. Розроблено
математичну модель насосної станції, при регулюванні витрати води на основі
взаємодоповнюючих інженерних, аналітичних та чисельних методів. Дана модель
враховує як характеристики механічних навантажень на асинхронний двигун так і
гідравлічний опір трубопроводу.
Список використаної
літератури
1. Шабанов
В.А., Алексеев В.Ю., Кабаргина О.В. Снижение потерь электроэнергии в сети при замене
нерегулируемого привода центробежных насосов на частотно-регулируемый // Электронный
научный журнал «Нефтегазовое дело».2010. 4 с.
2. Забродин
Ю. С. Промышленная электроника; Учебник для вузов. [текст] /Забродин Ю. С. М.:
Высшая школа, 1982.-345с..
3. Белов
М.В. Исследование влияния частотно-регулируемого привода в современных системах
управления. // Научно-техническая конференция студентов, аспирантов и молодых
специалистов МИЭМ 2008г. c 135-136
4. Ведерников
В.А., Лысова О.А. Описание и анализ стендовых исследований насосной
электроцентробежной установки (УЭЦН) // Изв. вузов. Горный журн. 2003. № 5. С.
89–92.