УДК 621.039.1
І.О.Огар,
П.В.Гікало
Націотальний
технічний університет України «Київський політехнічний інститут», м.Київ
ДОСЛІДЖЕННЯ
ДИНАМІКИ ПРОХОДЖЕННЯ САР РІВНЯ ВОДИ В БАРАБАННОМУ ПАРОГЕНЕРАТОРІ АЕС
Анотація
Огар І.О., Гікало П.В. Дослідження динаміки проходження САР рівня води в
барабанному парогенераторі АЕС. В роботі розглядається парогенератор (ПГ), як об’єкт управління. Розроблено
експериментально-аналітичну модель динаміки ділянки живлення барабанного
парогенератора. Щоб задовольнити поставлені задачі, тобто удосконалити САР
(зменшити динамічний викид і час регулювання) запропоновано модернізовану САР.
Ключові слова:
парогенератор, САР, схема регулювання, модель ділянки живлення.
Загальна
постановка проблеми.
На теплоенергетичних підприємствах України йде заміна аналогових апаратних
засобів локальних САР технологічними процесами на мікропроцесорні управляючі
комплекси, що відрізняються великими перевагами порівняно з аналоговою
технікою. Однією з головних - можливість реалізації нових схем і алгоритмів
управління технологічними процесами. Однак, незважаючи на те, що вже зараз
розроблено математичний апарат для створення цифрових систем регулювання,
впровадження нової техніки здійснюється з використанням застарілих типових схем
і алгоритмів регулювання, що не сприяє повному використанню потенціалу цифрової
техніки.
Удосконалення автоматизованих систем управління технологічними процесами
енергоблоків АЕС і промислових барабанних котлів є найважливішим способом
підвищення їхньої ефективності та надійності і однією з необхідних умов
підвищення якості і зниження собівартості кінцевого продукту, сприяє
економічному зростанню і технічному престижу держави.
Крім того, динамічні властивості ПГ по рівню води отримані по
експериментальним кривим розгону. При збуренні витратою пари і живильною водою
проявляється явище «набухання», коли в перші моменти часу після нанесення
збурення рівень води відхиляється в сторону, що не відповідає знаку
математичного небалансу між витратою пара і води. Саме тому кожен з каналів
описується сумою інтегрального і інерційного ланок з відповідними
коефіцієнтами, при чому, інтегральна ланка в моделі є загальною для обох
каналів
Математичні моделі барабанних котлів розроблені багатьма
дослідниками. На величину рівня в барабані впливає багато факторів: витрата
пари та її температура, витрата живильної води і її температура, тиск у
барабані, яке, у свою чергу, залежить від витрати пари і живильної води,
витрати палива, рециркулювання газів, тиску клапанів турбіни та інші параметри.
Основними
факторами з вище названих є витрата води і витрата пари.
Підвищення
економічності роботи теплоенергетичного обладнання за рахунок підвищення
технічного рівня систем автоматичного регулювання можливо за двома основними
напрямками: використання сучасного комплексу технічних засобів
(комп'ютеризовані керуючі комплекси з надійними, високоточними, мало
інерційними датчиками технологічних параметрів) та удосконалення структурних
схем систем автоматичного регулювання (як правило, за рахунок введення в контур
контролю додаткових інформаційних сигналів про зміну технологічних параметрів
або використання більш складного алгоритму управління).
Значний
інтерес представляють технічні рішення, які без залучення значних коштів
дозволяють знизити споживання палива і зменшити викиди шкідливих речовин в
навколишнє середовище. Заміна даним часом на деяких промислових об'єктах
застарілих технічних засобів на комп'ютеризовані системи управління
відбувається з використанням старих алгоритмів і схем регулювання, тобто не використовуються
переваги і можливості мікропроцесорної техніки. Таким чином, для підвищення
якості процесів управління барабанними парогенераторами, зменшення відхилень
регульованих параметрів, підвищення надійності устаткування і збільшення числа
годин його використання необхідно застосовувати нові способи і алгоритми
управління, в тому числі оптимальні.
Ефективне управління барабанними парогенераторами, промисловими і
енергетичними котлами у нормальних і аварійних режимах значною мірою забезпечує
динамічну стійкість промислової установки. Найважливіший параметр, від якого
залежить виконання цих функцій, – рівень води у ПГ, який необхідно підтримувати
на визначеному нормативному значенні. Підвищення рівня в котлах приводить до
збільшення вологості пари, закиду води у пароперегрівні поверхні, зниження
температури пари, гідроударів, при неприпустимому зниженні рівня може
порушитися циркуляція внаслідок улучення значної кількості пари в опускні труби
і відбутися перепалення екранних труб котла. Зниження рівня в ПГ АЕС приводить
до погіршення теплообміну і підвищення температури води першого контуру, а
також до зменшення аварійного запасу води для охолодження реактора, підвищення
рівня супроводжується збільшенням вологості і зменшенням потужності
енергоблока.
Таким чином, для підвищення якості процесів управління барабанними
парогенераторами, зменшення відхилень регульованих параметрів, підвищення
надійності устаткування і збільшення числа годин його використання необхідно
застосовувати нові способи й алгоритми управління, в тому числі оптимальне
управління з використанням сучасної мікропроцесорної техніки.
Для досягнення поставлених цілей необхідно розв'язати такі задачі:
- проаналізувати
існуючі САР рівня води в барабанному ПГ;
- розробити
математичну модель динаміки барабанного котла і математичну модель ділянки
живлення барабанних парогенераторів.
- синтезувати оптимальний закон регулювання рівня води в барабанному ПГ.
Аналіз відомих рішень.
В даній роботі розглянемо контур регулювання парогенератора у режимі
високого навантаження.
Застосування пропорційно-інтегрального (ПІ) закону регулювання для
астатичного об'єкту з явищем "набухання" не забезпечувало необхідної
якості регулювання (тривалі слабо затухаючі коливання рівня при ступінчастому
вхідному обуренні). Інтегральний (І) закон також давав погану стійкість
системи. Пропорційний (П) закон не був не допустимим по причині статичної
помилки регулювання. Тому для регулювання рівня в ПГ раніше застосовували
комбіновані АСР; регулювання по відхиленню з П-регулятором і контуром
інваріантності по основній обурюючій дії - витраті пари.
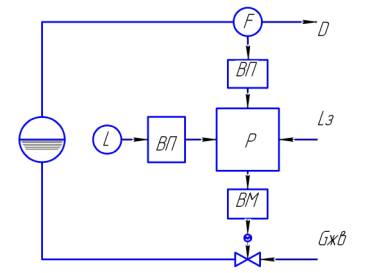
Мал 1 – Принципова
схема АСР рівня з пристроєм введення по
збуренню
ВП – вимірюючий перетворювач; ВМ – виконавчий механізм; Р
– регулятор; ![]() – витрата
живильної води;
– витрата
живильної води; ![]() – завдання
по рівню;
– завдання
по рівню; ![]() – витрата
пари;
– витрата
пари; ![]() – давач рівня;
– давач рівня; ![]() – діафрагма.
– діафрагма.
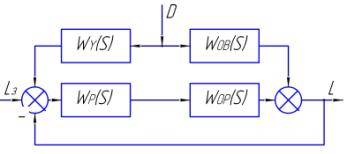
Мал. 2 – Структурна схема АСР
рівня з пристроєм введення по збуренню
WОВ(S),
WОР(S)
– передавальні функції об’єкта по
збуренню і регулюючому каналам відповідно;
WУ(S)
– передавальні функції пристрою вводу (з вимірювальним перетворювачем);
WР(S)
– передавальна функція регулятора.
Запишемо передавальну функцію по каналу “витрата
пари– рівень”:
![]() (1)
(1)
 (2)
(2)
 - передавальна
функція фільтра по збурювальному каналу.
- передавальна
функція фільтра по збурювальному каналу.
Для того щоб система була інваріантною до збурення по витраті пара D, повинна
виконуватись умова:
![]() (3)
(3)
При цій
умові ми отримаємо:
 (4)
(4)
Якщо припустити, що динамічні властивості ПГ по збуренню і регулюючим
каналам рівні, але протилежні за знаком, тобто
![]() , (5)
, (5)
То
 (6)
(6)
Оскільки для П-регулятора WР(S)=КР,
то отримаємо:
![]() (7)
(7)
Таким чином в припущенні (5) пристрій вводу повинен описуватись рівнянням
пропорційної ланки з коефіцієнтом передачі КУ.
Однак в такому випадку необхідність в спеціально створеному пристрої вводу
відпадає, так як перетворювачі витрати (дифманометри) описуються рівнянням
пропорційної ланки, а необхідний коефіцієнт передачі КУ можна отримати за допомогою ручки «чутливості» в
самому регуляторі.
Проте розглянута 2-імпульсна схема регулювання промисловості не
застосовується по наступних причинах:
1) витрата живильної води через регулюючий живильний клапан залежить не
тільки від положення клапана, але і від перепаду тиску на ньому, який в процесі
експлуатації може змінюватися;
2) у дифманометрах-витратомірах колишніх років випуску вихідний сигнал був
пропорційний кореню квадратному від перепаду тиску.
Вказані недоліки 2-контурної АСР було усунуто введенням в регулятор
третього імпульсу по витраті живильної води від дифманометра-витратоміра. Така
3-імпульсна АСР зображена на мал. 3. Принцип роботи АСР наступний. Сигнали по
витраті пари і живильної води вводяться в регулятор з протилежними знаками. У
сталому стані ці сигнали рівні, протилежні по знаку і, отже, компенсують один
одного.
Сигнал по рівню води в ПГ компенсується сигналом завдання. При зміні
витрати пари миттєво змінюється відповідний сигнал на вході в регулятор і
останній пропорційно змінює витрату живильної води, не чекаючи зміни рівня.
У регуляторі використовується ПІ-закон регулювання, проте унаслідок
введення в регулятор практично безінерційного негативного зворотного зв'язку по
витраті живильної води в ньому реалізується П-закон регулювання (аналогія жорсткого
зворотного зв'язку по положенню регулюючого органу). Статична нерівномірність
П-регулятора усувається корегуючим сигналом по витраті пари.
Мал. 3 – Принципова схема
3-імпульсної АСР рівня
ВП – вимірюючий перетворювач; Р – регулятор; ![]() – витрата
живильної води;
– витрата
живильної води; ![]() – завдання
по рівню;
– завдання
по рівню; ![]() – витрата
пари;
– витрата
пари; ![]() – давач рівня;
– давач рівня; ![]() – діафрагма.
– діафрагма.
Використання
3-імпульсної АСР рівня води в ПГ з П- та ПІ-регулятором дозволяє з імпульсами
по витраті живильної води і пари дозволяє регулювати об'єкт з ефектом
"набухання".
Таким чином, можливо придушення стрибкоподібних обурення витратою пари величиною до 18 кг / с без виходу рівня з 50-міліметрової зони. Обурення ж витратою живильної води практично будь-якої величини (до 510 кг / с), що подаються на ПГ не
призводять до виходу рівня з 50-міліметрової зони.
При всьому цьому ми маємо аперіодичний перехідний процес регулювання рівня з часом регулювання менш ніж 200 с.
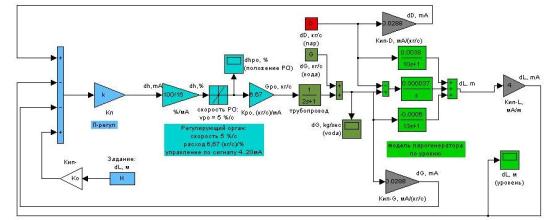
Мал. 4 – Структурна схема моделі 3-імпульсної
АСР живлення ПГ
П-регултор
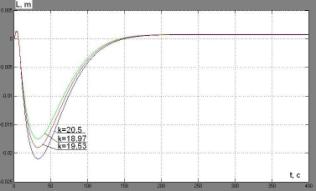
В процесі
дослідження отримані різні настройки регулятора: Кр=20,5 [3], Кр=18,97
та Кр=19,53 (останні отримані в середовищі Matlab за допомогою блока Simulink Design Optimization).
Результати
отримані при дослідженні П-регулятоора показані на малюнках:
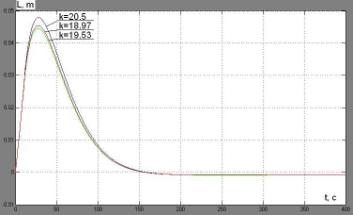
Мал. 5 – Порівняння перехідних процесів рівня води в ПГ
при стрибкоподібній зміні витрати пара 10 кг/с
Таблиця 1 – Порівняння настройок П-регулятора при різних
настройках при стрибкоподібній зміні витрати пара
|
|
Кр=20,5 |
Кр=18,97 |
Кр=19,53 |
|
|
0,001 |
0,001 |
0,001 |
|
Yд, м |
0,048 |
0,044 |
0,045 |
|
Т, с |
175 |
175 |
175 |
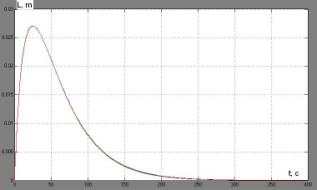
Мал. 6 – Порівняння перехідних процесів рівня води в ПГ
при стрибкоподібній зміні витрати живильної води 10 кг/с
Таблиця 2 – Порівняння
настройок П-регулятора при різних настройках при стрибкоподібній зміні витрати
живильної води
|
|
Кр=20,5 |
Кр=18,97 |
Кр=19,53 |
|
|
0,001 |
0,001 |
0,001 |
|
Yд, м |
0,022 |
0,017 |
0,018 |
|
Т, с |
175 |
175 |
175 |
При різних оптимальних значення виникає статична похибка,
хоч і незначна. Позитивним моментом використання цього регулятора це швидка
реакція на зміну рівня (час регулювання до 200 с). Охарактеризувавши отримані
результати можна зробити висновок, що кращий параметр Кр=18,97, оскільки по всім каналам у нього найменша
динамічна похибка. Статична помилка та час регулювання у всіх розглянутих
параметрах однакові.
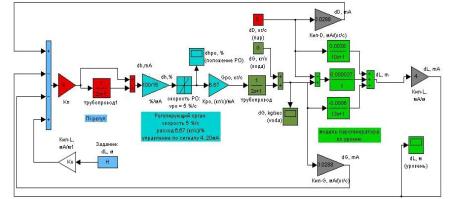
Мал. 7 – Схема моделі 3-імпульсної АСР живлення ПГ ПІ регултор
В процесі
дослідження отримані різні настройки регулятора: Кр1=2.55; T1=7.14c [3], Кр2=1; T2=4c [4] та Кр3=1.957; T3=6.87c (останні отримані в середовищі Matlab за допомогою блока Simulink Design Optimization).
Результати
отримані при дослідженні ПІ-регулятоора показані на малюнках:
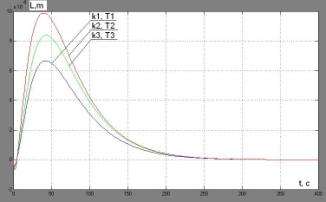
Мал. 8 – Порівняння перехідних процесів рівня води в ПГ
при при стрибкоподібній зміні витрати пари 10 кг/с
Таблиця 3 – Порівняння
настройок ПІ-регулятора при різних настройках
|
|
Кр1=2.55; T1=7.14c |
Кр2=1; T2=4c |
Кр3=1.957; T3=6.87c |
|
|
0 |
0 |
0 |
|
Yд, м |
0,027 |
0,027 |
0,027 |
|
Т, с |
300 |
300 |
300 |
Мал. 9 – Порівняння перехідних процесів рівня води в ПГ
при при стрибкоподібній зміні витрати живильної води 10 кг/с
Таблиця 4 – Порівняння настройок ПІ-регулятора при різних
настройках
|
|
Кр1=2.55; T1=7.14c |
Кр2=1; T2=4c |
Кр3=1.957; T3=6.87c |
|
|
0 |
0 |
0 |
|
Yд, м |
0,00066 |
0,00082 |
0,00099 |
|
Т, с |
280 |
280 |
280 |
Принцип
роботи САР наступний: сигнали по витраті пару й живильної води
вводяться в регулятор із протилежними знаками. У сталому стані ці сигнали
рівні, протилежні за знаком, отже, компенсують один одного. Сигнал за рівнем
води в ПГ компенсується сигналом завдання. При зміні витрати пари миттєво
змінюється відповідний сигнал на вході в регулятор та останній, пропорційно
змінює витрату живильної води, не чекаючи зміни рівня. Використається ПІ-закон
регулювання, однак внаслідок введення в регулятор практично безінерційного
негативного зворотного зв'язку по витраті живильної води, в ньому реалізується
П-закон регулювання (аналогія жорсткого зворотного зв'язку за положенням регулювального
органа). Статична нерівномірність П-регулятора усувається корегуючим сигналом
по витраті пару.
Використання
3-імпульсної САР рівня води в ПГ з ПІ-регулятором дозволяє з імпульсами по
витраті живильної води і пару дозволяє регулювати об'єкт з ефектом
"набухання". Можливо придушення стрибкоподібного обурення витратою
пару величиною до 18 кг/с без виходу рівня з 50-міліметрової зони. Обурення, що
подаються на ПГ, витратою живильної води практично будь-якої величини (до 510
кг/с) не призводять до виходу рівня з 50-міліметрової зони. При всьому цьому
аперіодичний перехідний процес регулювання рівня води в ПГ з часом регулювання
менш ніж 250 с.
З усіх досліджених параметрів можна зробити висновок, що
кожен по своєму має свої позитивні сторони. По каналу «збурення паром - вихід» всі параметри показали ідентичні
результати, а по каналу «збурення
живильною водою – вихід» – k2=2,55
i T2=7,14 [3], так як час регулювання у всіх практично однаковий, а динамічна помилка у
цих параметрів найменша (0,00066 м). Статична похибка по всім каналам відсутня.
Розглянуті властивості ПІ-регулятора рівня води в
барабанному парогенераторі відповідає заданим вимогам, але на сьогоднішній день
при появі мікропроцесорної техніки, що має низьку вартість, малі розміри,
високу надійність та універсальність у функціональному відношенні, та відкриває
нові можливості для вдосконалення систем контролю і управління технологічними
процесами, має сенс розглянути та дослідити більш досконалі регулятори рівня
води.
Рішення задачі та результати дослідження
Розрахункова схема парогенератора
зображена на малюнку:
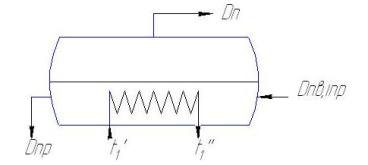
Мал. 10 – Розрахункова схема ПГ
V – об’єм води і пара в стані насичення; Gв і Gп – маса води і пари
відповідно.
Підвід
теплоти відбувається теплоносієм І-го контуру з початковою температурою t1 і t1. Живильна
вода з витратою Dпв поступає в
ПГ не догрітою до стану насичення з ентальпією іпв.
Для опису
динаміки ПГ використовуємо рівняння зберігання енергії, маси і об’єма.
Рівняння
зберігання маси речовини в ПГ:
![]() (8)
(8)
Рівняння зберігання енергії:
![]() (9)
(9)
![]() - зовнішній підвід
теплоти від І-го контуру.
- зовнішній підвід
теплоти від І-го контуру.
Оскільки
постійний об’єм води в парі постійна величина, то можна записати:
![]() (10)
(10)
![]() - функції тиску.
- функції тиску.
Продиференціюєм ліві частини рівнянь
(8), (9), (10) як складні функції і отримаємо:
 (11)
(11)
Вирішимо
систему (11) відносно ![]() ,
, ![]() ,
, ![]() :
:
 (12)
(12)
![]() (13)
(13)
![]() (14)
(14)
 (15)
(15)
![]() – кількість генеруючого в ПГ пара.
– кількість генеруючого в ПГ пара.
![]() - теплота
пароутворення.
- теплота
пароутворення.
Як видно з (12)
та (13) у стабілізованому режимі витрати рівні ![]() , при невиконанні енергетичного і матеріального балансу тиск
і маса води в ПГ змінюється по І-закону.
, при невиконанні енергетичного і матеріального балансу тиск
і маса води в ПГ змінюється по І-закону.
Однак при
підвищенні тиску збільшується витрата пара з ПГ, через це тиск змінюється по
експоненціальному закону, тобто ПГ описується аперіодичною ланкою.
Оскільки маса
води змінюється по І-закону, то відповідним образом міняється і рівень води.
Якщо ПГ
заповнений водою в стані насичення, то об’єм води під дзеркалом випаровування:
![]() (16)
(16)
При зміні
цього об’єму міняється і рівень води:
![]() (17)
(17)
![]() - площа дзеркала випаровування.
- площа дзеркала випаровування.
Розділив
обидві частини (17) на ![]() і перейшовши до
границі при
і перейшовши до
границі при ![]()
![]() (18)
(18)
Так як
густина води ![]() слабо залежить від
тиску, останнім додатком можна знехтувати:
слабо залежить від
тиску, останнім додатком можна знехтувати:
![]() (19)
(19)
Однак коли
вода в ПГ кипить, то рівень води визначається не тільки об’ємом води але і об’ємом
пара ![]() , що знаходиться під дзеркалом випаровування. Тоді (17)
запишемо в виді:
, що знаходиться під дзеркалом випаровування. Тоді (17)
запишемо в виді:
![]() (20)
(20)
![]() об’ємний паровміст.
об’ємний паровміст.
Значення ![]() та
та ![]() оцінюються на основі
тепло гідравлічних розрахунків.
оцінюються на основі
тепло гідравлічних розрахунків.
Для
визначення ![]() в змінних режимах можна використати рівняння:
в змінних режимах можна використати рівняння:
![]() (21)
(21)
Сталу часу Т можна визначити за формулою:
![]() (22)
(22)
Індекс о відноситься до номінального режиму.
Розкриємо величину ![]() в (15)
в (15)
Для встановленого режиму
![]() (23)
(23)
![]() - витрата через ПГ теплоносія 1-го контуру.
- витрата через ПГ теплоносія 1-го контуру.
![]() - питома теплоємність теплоносія
- питома теплоємність теплоносія
![]() - температура теплоносія на вході і виході відповідно.
- температура теплоносія на вході і виході відповідно.
Вказані величини визначаються з
статичного розрахунку.
Температура
на вході в ПГ ![]() рівна температурі
теплоносія на виході з реактора. Можна допустити, що температура
рівна температурі
теплоносія на виході з реактора. Можна допустити, що температура ![]() на виході з гріючих
труб близька до температури насичення
на виході з гріючих
труб близька до температури насичення ![]() другого контуру ПГ. З
достатньою точністю можна вважати, що приріст температури
другого контуру ПГ. З
достатньою точністю можна вважати, що приріст температури ![]() рівний приросту
температури
рівний приросту
температури ![]() . Тоді з (23) при сталій витраті
. Тоді з (23) при сталій витраті ![]() маємо:
маємо:
![]() (24)
(24)
Відхилення
![]() (25)
(25)
де ![]() ,
, ![]() - похідна температури
насичення по тиску, що визначається по термодинамічним процесам.
- похідна температури
насичення по тиску, що визначається по термодинамічним процесам.
![]() - відхилення тиску
від тиску насичення в номінальному режимі.
- відхилення тиску
від тиску насичення в номінальному режимі.
Рівняння (25)
не враховує теплову інерцію теплоносія і стінок труб. Для її приблизної оцінки
розрахунок можна вести по еквівалентній температурі ![]() , закон зміни якої приблизно враховує запізнення теплового
потоку при зміні температури теплоносія і визначається з рівняння:
, закон зміни якої приблизно враховує запізнення теплового
потоку при зміні температури теплоносія і визначається з рівняння:
![]() (26)
(26)
де ![]() - еквівалентна
постійна часу гріючих труб (
- еквівалентна
постійна часу гріючих труб (![]() =(3….4)c).
=(3….4)c).
З врахуванням (25) і (26) отримаємо:
![]() (27[i])
(27[i])
В (12) слід врахувати вплив тиску Р на
теплоту, що підводиться ![]() (27) і на витрату
пара.
(27) і на витрату
пара.
Витрата пару із ПГ
![]() (28)
(28)
де ![]() ,
, ![]() - дійсний і
номінальний тиск пару перед турбіною.
- дійсний і
номінальний тиск пару перед турбіною.
Z – переміщення сервомотора регулюючих
клапанів турбіни (в номінальному режимі Z=1).
При цьому
припускається, що тиск пару перед турбіною і в ПГ однакові, тобто ![]() =
=![]() .
.
Лінеаризуючи (28), отримаємо
![]() (29)
(29)
Переходячи в чисельнику рівняння (12)
до відхилень і підставляючи (24) і (29), після перетворення отримаємо (при ![]() =const)
=const)
![]() (30)
(30)
де ![]() ;
;
![]() ;
;
![]() ;
;
 ;
;
![]() ;
;
![]()
![]() - знаменник в (12).
- знаменник в (12).
Величини ![]() і
і ![]() слабо впливають на
тиск.
слабо впливають на
тиск.
Таким чином,
динаміка ПГ по рівню пароводяної суміші описується системою рівнянь (13), (15),
(19), (20), (21), (27). Після лінеаризації отримаємо таку систему рівнянь:
 (31)
(31)
Перетворимо систему
рівнянь, виключивши з неї проміжні величини і отримаємо:


У структурну схему ділянки живлення барабанних входять
такі елементи: парогенератор, що враховує динаміку зміни рівня пароводяної
суміші при зміні витрат живильної води та пари, живильний трубопровід, що є
сполучним елементом ділянки живлення і враховує динаміку зміни витрати
живильної води в результаті зміни положення регулюючого органу. Структурна
схема ПГ в загальному вигляді представлена на рис
Мал. 11 – Структурна схема ПГ
Вирішення цих рівнянь
в операторній формі дозволяє получити приведені нижче передаточні функції
розглянутої ділянки по наступним каналам:
1.
«Витрата живильної води – рівень»
![]()
де ![]()
![]()
![]()
2.
«Витрата пара – рівень»
![]()
де ![]()
![]()
Видно,
що передаточні функції по обом каналам мають однаковий вид і представляють
собою добуток інтегрального і інтегродиференціальних ланок.
Для моделювання
записують передаточну функцію у такому вигляді:
![]()
де 
![]()
![]()
Експериментальним шляхом були отримані розгінні криві парогенератора за
рівнем при подачі на нього збурень витратою живильної
води і витратою пара.
Дані властивості парогенератора можна описати сумою передавальних функцій інерційної і
інтегральної ланок, а коефіцієнти визначити експертно-дослідним шляхом за допомогою програми Simulink, що входить в програмний пакет Matlab.
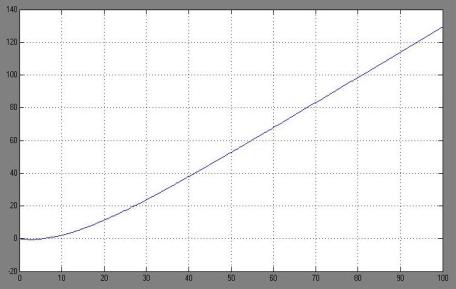
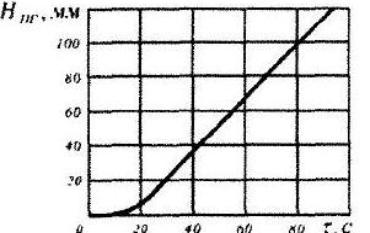
Мал. 12 – Крива розгону ПГ по рівню при збуренні
витратою живильної води 150 т/год
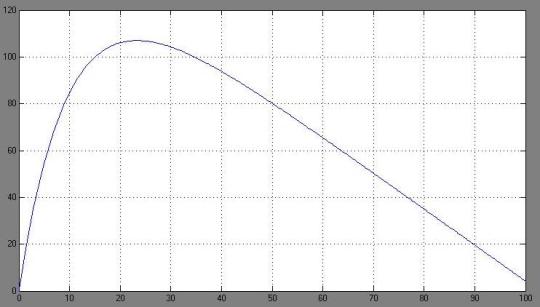
Мал. 13 – Криві розгону ПГ по рівню при збуренні
витратою пари 150 т/год
Мал. 14 – Крива розгону ПГ за рівнем при подачі
стрибкоподібного збурення
витратою живильної води DG = 10 кг / с
Мал. 15 – Крива розгону
ПГ за рівнем при
подачі стрибкоподібного збурення
витратою пари DD = 10 кг / с
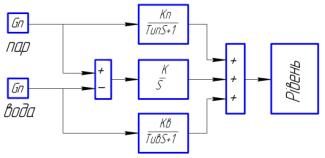
Мал. 16 – Структурна схема моделі парогенератора
Власне об’єкт по каналу регулюючої дії моделюється паралельно включеними
ланками з передаточними функціями К2/S і К1в(ТвS+1), а по
каналу витрати пара – передаточними функціями К2/S і К1п(ТпS+1).
Таким чином, астатизм об’єкта моделюється загальною для двох об’єктів
інтегральною ланкою, знак взаємодії на рівень води при збуренні витратою пара і
живильної води враховується в суматорі перед вказаною ланкою. Динамічні
властивості ПГВ-1000 в номінальному режимі описуються при наступних
коефіцієнтах передаточних функцій:
![]() =0.0038
=0.0038 ![]() =-0.0006
=-0.0006 ![]() =0.000037
=0.000037 ![]() =10
=10 ![]() =13
=13
Пропорційна і
інтегруюча ланки моделюються роздільно.
Рівень у ПГ
вимірюється датчиком типу Сапфир-22ДД по малому рівнеміри з межею вимірювання
0-4000 мм, використовуючи двокамерний зрівняльний судину. Статична характеристика
рівнеміра наведена на мал. 17а.
Витрата води
вимірюється по перепаду тиску на звужуючому типу "діафрагма" датчиком
типу Сапфир-22ДД з вихідним струмовим сигналом 4 - 20 мА з межами вимірювання 0
- 555 кг/с (0 - 2000 т/год). Статична характеристика витратоміра наведена на
мал.17б.
Витрата пари
оцінюється по температурі і тиску в трубопроводі І контуру до і після ПГ.
Сигнал витрати пари подається у вигляді нормованого токового сигналу 4 - 20 мА
з межею вимірювання 0 - 555 кг/с (0 - 2000 т/год). Статична характеристика
витратоміра наведена на мал.17б.
Таким чином,
вимірювальні перетворювачі можна описати передавальними функціями пропорційних
ланок з коефіцієнтами передачі, які дорівнюють (з графіків)
КіпL = 4, mA/м - для вимірювання рівня води в ПГ;
КіпG = КіпD
= 0.0288, mA/(кг/с) - для вимірювання витрат живильної води і пари відповідно.

Мал. 17 – Статичні
характеристики ВП типу «Сапфир-22ДД» для виміру
рівня – а) і витрат живильної води і пари – б)
Регулювання рівня води здійснюється шляхом зміни витрати живильної
води через регулюючий живильний
клапан, який здійснює
регулювання в межах 0 .. 100%.
Позиціонер управляє приводом електродвигуна постійного струму регулюючого живильного
клапана. На позиціонер
надходить сигнал завдання відкриття клапана у
вигляді нормованого токового
сигналу 0 .. 20мА.
Максимальна швидкість переміщення штока становить
5%/с.
Видаткова характеристика регулюючого живильного клапана наведена
на малюнку
Мал. 18 – Статична характеристика регулюючого живильного клапана
Як видно, статична характеристика клапана близька
до лінійної. Таким чином, для моделювання витрати
живильної води через клапан по каналу "Ступінь відкриття,% -
витрата на клапані,
кг / с" можна описати пропорційним ланкою з коефіцієнтом
пропорційності Кро = 6.67 (кг
/ с) /%. На вхід ланки повинен
подаватися сигнал положення штока у
відсотках ходу РВ (0-100% ХРВ).
Живильний трубопровід від клапана до
парогенератора моделюється інерційною ланкою 1го
порядку з коефіцієнтом передачі Ктр
= 1 і постійної
часу Ттр
= 2с [1].
Структурна схема моделі РВ з позиціонером, і трубопроводом
до ПГ зображена
на малюнку
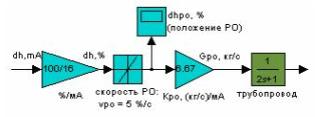
Мал. 19 – Структурна схема моделі
РО з двигуном постійного струму
Розглянута 3-імпульсна схема регулювання рівня багато років використовується
в парогенераторах, проте останніми
роками на деяких АЕС вона зазнала деякі зміни, у зв’язку з вище перекисленими
проблемами.
Це пов'язано з бажанням виключити необоротні втрати тиску в звужуючому
пристрої для вимірювання витрати пари. Ці втрати є істотними для атомних
енергоблоків, що виробляють насичену пару відносно низького тиску. У модернізованій
схемі в регулятор замість сигналу по витраті пари вводиться сигнал по різниці
температур теплоносія в гарячій і холодній нитках циркуляційних трубопроводів ΔТ= Тг - Тх.
Проте вказаний сигнал при різкій зміні витрати пари змінюється з істотним
ємкісним запізнюванням, унаслідок чого регулятор помилково спрацьовує по
чиннику "набухання" рівня, не забезпечуючи необхідної якості
регулювання. “Набуханням” називають зміну рівня в початкові моменти часу убік, не
відповідному знаку збурюючої дії. Виявилися і інші недоліки такої схеми:
- при зростанні електричної
потужності унаслідок зміни температури живильної води виникає істотна похибка
оцінки витрати пари безпосередньо по сигналу ΔТ,
що приводить до зміни підтримуваного регулятором рівня в ПГ на 0,1 м;
- при відключенні ГЦН сигнал
змінюється з великою інерційністю, унаслідок чого регулятор зменшує подачу
живильної води також з великою інерційністю, що приводить до переживлення
відповідного ПГ.
Для усунення вказаних недоліків були ухвалені наступні технічні рішення.
Для виключення статичної нерівномірності по рівню застосована корекція сигналу ΔТ по температурі живильної води Тжв. Для швидшого реагування АСР на
збурення по парі в регулятор введений додатковий сигнал за швидкістю зміни тиску
в ГПК.
Для усунення переживлення ПГ при відключенні ГЦН було введено управління
регулятором живлення по збуренню: при відключенні ГЦН проводиться примусове
закриття по блокуванню відповідного основного регулюючого живильного клапана
РЖК і засувки перед ним. Регулювання рівня в цьому ПГ перекладається на
регулятор живлення пуско-зупинний (РЖПЗ), що працює в спостерігаючому режимі по
П-закону. При включенні ГЦН під дією блокування проводиться примусове відкриття
РЖК протягом 1 хвилини при закритій засувці перед ним і потім, коли після
закінчення "набухання" рівень в ПГ починає зменшуватися, проводиться
відкриття засувки і включення в роботу регулятора живлення основного (РЖО).
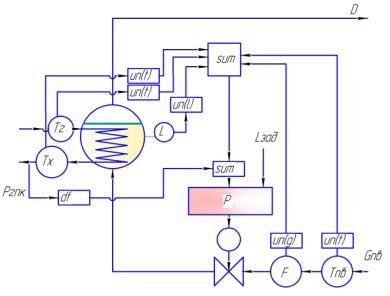
Мал.
20 – Принципова схема модернізованої
АСР рівня.
![]() – тиск в
головному паровому колекторі; Тпв
– температура живильної води;
– тиск в
головному паровому колекторі; Тпв
– температура живильної води; ![]() – рівень в
парогенераторі; Gпв – витрата живильної води;
– рівень в
парогенераторі; Gпв – витрата живильної води;
![]() –
температура холодної нитки;
–
температура холодної нитки; ![]() –
температура гарячої нитки; df –
диференціатор; SUM – суматор; Р – регулятор.
–
температура гарячої нитки; df –
диференціатор; SUM – суматор; Р – регулятор.
Порівняємо перехідний процес за рівнем води модернізованої системи з
перехідною характеристикою в типовій схемі при обуренні – витрата пари.
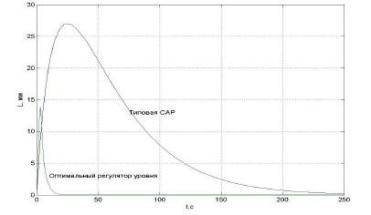
Мал.
21 – Перехідна характеристика зміни
рівня води (збурення – витрата пари)
В САР відсутня статична помилка регулювання, а використання одного сигналу
від дифманометра-рівноміра підвищує надійність ситеми і зменшує її вартість.
1. В роботі розглянуто парогенератор
як об’єкт управління. Проаналізовано
стандартні рішення САР рівня води в ПГ з П- та ПІ-регуляторами. САР з
імпульсами по витраті живильної води і пару дозволяє регулювати об’єкт з ефектом
«набухання».
2. З метою
задоволення жорстких вимог до стабілізації рівня води в парогенераторі, а також
забезпечення поставленої точності підтримки рівня в статичних режимах
запропонована модернізована схема регулювання. Отримана математична модель
динаміки ділянки живлення ПГ в просторі стану.
3. Проведено
моделювання САР і результати моделювання підтверджують працездатність системи.
Модернізована схема виключає необоротні втрати тиску в звужуючому пристрої для
вимірювання витрати пари, також усуває статичну нерівномірність по
рівню і усуває переживлення ПГ при відключенні ГЦН.
Список використаної
літератури
1. Демченко В.А. Разработка математической модели участка питания
парогенератора энергоблока с ВВЭР / В.А. Демченко, В.Ф. Ложечников // Труды
Одесск. Политехнического ун-та. – 1999. – Вып. 2(8). – с.111-120.
2. Синтез и анализ
законов управления системой регулирования уровняв барабане газомазутного
парового котла с учетем экономии энергоресурсов /А.А,Журавлев, М.Л.Шит, О.Б.
Попонова // Problemele energeticii regionale/ -
2005/ -№1.
3. Жукова Н.В.,
Сухарева Т.Н., Исследование САР уровня воды в ПГ // Донецкий национальный
технический университет// -2011/. – с.8
4. Клюєв
А.С. Наладка систем автоматического регулирования барабанних парових котлов
/А.С.Клюєв, А.Т.Лебедєв, С.І.Новіков. – М.: Энергоатомиздат, 1985. – 208с.