Технические науки/11
Робототехника.
Евстигнеев М.И., Гао Лу, Лазаревич А.А.,
Литвинов ЮВ., Мазулина В.В., Мищенко
Г.М., Фролов С.Н.
НИУ
ИТМО, Россия, Санкт-Петербург.
Организация движения
мобильного робота в заданную точку с учётом препятствий
Важнейшая
задача робототехники сегодня – конструирование полностью автономных
робототехнических систем. Робот должен уметь анализировать обстановку и при
возникновении обстоятельств мешающих дальнейшему выполнению заданной программы,
самостоятельно принимать решения. Прежде всего, автономность робота должна
проявляться при решении навигационных задач.
Оператор,
управляя дистанционно n-ым количеством роботов
через ПК, выводит их, например, на автомобильную парковку, территорию которой
необходимо исследовать на наличие посторонних предметов. Каждому МР задается определенный маршрут
движения, который он должен отработать на определенном участке парковки.
Рассмотрим
мобильного робота (МР), управляемого через ПК с помощью WI-FI
модуля. В
качестве МР было использовано шасси от игрушечного автомобиля (Рисунок 1). [1]

Рисунок
1 – Мобильный четырехколесный робот.
На рисунке
2, представлена функциональная схема мобильного робота.
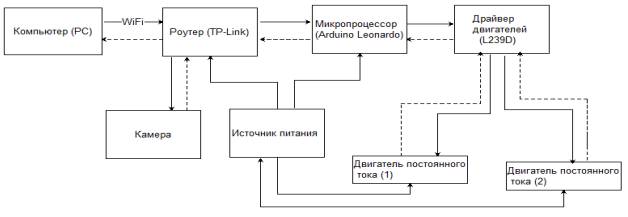
Рисунок 2 – Функциональная схема МР
Для
обнаружения и идентификации непредвиденных препятствий на пути движения робота он
снабжён системой, позволяющей:
1. Обнаруживать объекты,
возникающие на пути следования робота и мешающие его дальнейшему продвижению;
2. Выбирать траектории
объезда препятствия и дальнейшее следование по заданной программе;
3.
Корректировать траекторию маршрута, с целью достижения конечного пункта при
условии изменения первоначальной траектории.
Система
построена на использовании веб-камеры, ультразвукового датчика и компаса.
В ходе
настройки системы и подключения камеры к роутеру с альтернативной перепрошивкой
была обнаружена интересная особенность. При поиске оптимального соотношения
качества видеопотока и нагрузки на процессор наблюдалось изменение скорости передачи видео на компьютер при
изменении количества кадров в секунду (FPS). Когда частота кадров
находилась в пределе от 5 до 12, то при приближении к препятствию, на камере
появлялись помехи. Нагрузка на процессор при такой частоте составляла 5-10%.
При частоте 24 кадра в секунду нагрузка составляла 50%. И возникновение помехи
не наблюдалось. Следовательно, процессор роутера нормально справлялся с
видеопотоком при частоте 5-12 кадров в секунду. После некоторых тестов стало ясно, что все дело в связке роутера и камеры. Эта особенность работы
связки камера-роутер позволила использовать ее для определения наличия или
отсутствия препятствия. [2]
Предлагаемый
алгоритм обнаружения препятствия
посредством системы технического зрения заключается в следующем: в процессе
движения МР, на компьютер с камеры поступают
снимки, каждому из которых соответствует своя гистограмма зависимости
количества пикселей от яркости (Рисунок 3). Вычитая из среднего значения
гистограммы снимка без помехи средние значения гистограмм полученных в ходе
движения, получаем некоторое число. Если
это значение ≤ 0. 5, то на МР поступает сигнал, оповещающий о наличии препятствия на критическом
расстоянии и включается программа обхода обнаруженного препятствия. [4, 5]

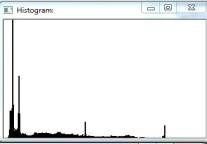
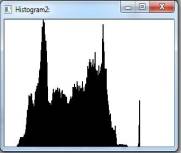
(А) (Б)
Рисунок
3. Гистограммы, соответствующие кадру с помехой(А), и кадру без помехи (Б)
Однако, если
МР будет двигаться по территории с низкой освещенностью, то сигнал
«Препятствие» будет постоянно поступать на машину. Поэтому бы решено
синтезировать методы обнаружения препятствия с помощью камеры и посредством
двух датчиков - ультразвукового датчика измерения расстояния HC-SR04,
который позволяет обнаружить препятствия, и цифрового компаса HMC5883L, позволяющего
по магнитному азимуту возвращаться на заданную траекторию после объезда
препятствия.
Принцип действия
ультразвукового датчика заключается в том, что сенсор излучает короткий
ультразвуковой импульс (в момент времени 0), который отражается от объекта и
принимается сенсором. Расстояние рассчитывается исходя из времени до получения
эха и скорости звука в воздухе. А функция магнитного компаса состоит в
определении углов между собственными осями сенсора X, Y, Z и силовыми линиями
магнитного поля Земли.
Рассмотрим алгоритм объезда препятствий МР. Особенностью алгоритма является подразделение его на два под-алгоритма. Первый
– простой, смысл которого заключается в быстром и безостановочном огибании
препятствия. Т.е. предположим, что на пути следования робота между точкой
старта А и пунктом назначения Б возникает препятствие. Его должен
идентифицировать ультразвуковой датчик, установленный на МР (Рисунок 4, А).
Когда датчик зафиксировал посторонний объект на траектории движения, робот с
микроконтроллера получает сигнал команды «ПОВОРОТ НАПРАВО НА 45 ГРАД». Если
после маневра новых препятствий не оказалось, то робот обходит препятствие и
возвращается на старую траекторию, используя установленный на нём компас
(Рисунок 4, Б). Так как зачастую препятствия встречаются несложные, то этот
способ объезда будет эффективен во многих случаях. Однако в случае неудачи объезда
помехи с помощью первого алгоритма (т.е. на пути маневра объезда встретилось
препятствие на критическом расстоянии, при котором маневр невозможен)
подключается второй, уже более совершенный вариант преодоления препятствия,
который должен выбрать наиболее оптимальную траекторию для обхода(Рисунок 4, В).
N (А) (В)
Рисунок
4 - Траектория движения мобильного робота (А – идентификация препятствия с
помощью ультразвукового датчика; Б – первый алгоритм объезда препятствия; В-
второй алгоритм объезда препятствия)
Возврат
на траекторию будет определяться следующим выражением :
![]() (1)
(1)
где D –
текущее расстояние до цели, L – расстояние,
пройденное роботом во время маневра до поворота на новую траекторию, ![]() – угол-место цели до
встречи с препятствием,
– угол-место цели до
встречи с препятствием, ![]() – азимут после
поворота на оптимальный угол.
– азимут после
поворота на оптимальный угол.
Таким образом, получившийся угол Х– искомый
новый угол-место цели после совершения маневра.
Второй алгоритм [3] объезда представлен на рисунке 5.
Рисунок 5. Блок-схема второго алгоритма объезда.
Если расстояние между препятствием и роботом критическое,
т.е. возможно, препятствие возникло внезапно, и соответственно расстояние,
полученное датчиком, оказалось меньше, чем заложенное в микроконтроллер для
обычного обхода препятствия, то МР предварительно отъезжает назад без поворота
на расстояние, которое будет пригодно для анализа обстановки и совершения
безопасного маневра объезда.
Литература.
1.
А.Б.Бушуев, Ю.В.Литвинов, В.В.Мазулина, С.Н.Фролов. «Организация программного
движения мобильного робота при обходе препятствий». Сб. научных трудов по
материалам МНПК /Современные тенденции в образовании и науке /ч.7, Тамбов– 2013
2.
Ю.В.Литвинов, В.В.Мазулина, С.Н.Фролов. «Использование веб-камеры для
обнаружения препятствий на пути движения мобильного робота». – Системы
обработки информации. Информационные проблемы теории акустических,
радиоэлектронных и телекоммуникационных
систем. Выпуск №7. – стр. 24 – 26. Харьков – 2013.
3. Евстигнеев М.И., Ю.В. Литвинов, Лазаревич
А. А. , Гао Лу, Мищенко Г. М. Управление мобильным роботом
на траектории с препятствиями. Сб. научных трудов по материалам МНПК «Современные
тенденции в образовании и науке», ч.16, стр. 38-39, Тамбов-2013.
4. А.
Пью. «Техническое зрение роботов» пер. с англ. – М.: Машиностроение, 1987. –
320 с.
5.
Б.И.Мошкин, А.А.Петров, В.С.Титов, Ю.Г.Якушенков.
«Техническое зрение роботов». – М.: Машиностроение. 1990. – 272 с.: ил. ISBiV
5-217-00467-3.