Д.т.н. Егошина И.Л.
Поволжский государственный технологический университет,
Йошкар-Ола
ПОВЫШЕНИЕ ДОСТОВЕРНОСТИ РАСПОЗНАВАНИЯ
ТРЕХМЕРНЫХ ОБЪЕКТОВ НА ОСНОВЕ ИТЕРАЦИОННОГО УГЛОВОГО СОГЛАСОВАНИЯ
Одной из существенных проблем при распознавании
изображений объектов является повышение достоверности распознавания. Повышение достоверности
распознавания можно получить за счет подавления шумов и помех, маскирующих и
искажающих изображение объекта; перехода к обработке трехмерных изображений объектов;
разработки методов распознавания, инвариантных к неинформативным параметрам [1].
Повышение
достоверности распознавания трехмерных объектов и сигналов будет способствовать
развитию интеллектуальных робототехнических и навигационных систем.
Целью данной работы является исследование распознавания
произвольно ориентированных трехмерных объектов на основе итерационного метода
углового согласования при отсутствии шума. На рис. 1 представлена структура устройства распознавания при
отсутствии шума, на вход которого подаются изображения эталонных объектов и
изображение распознаваемого объекта.
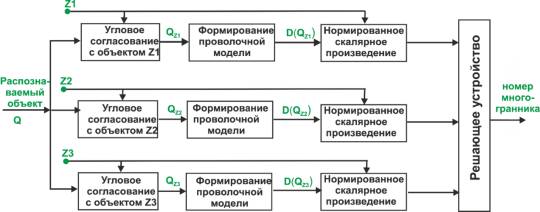
Рис. 1. Структура устройства
распознавания при отсутствии шума
На выходе устройство вырабатывает меру схожести
распознаваемого объекта с эталонами.
Методика экспериментальных исследований заключалась в
следующем: были заданы эталонные объекты
в виде многогранных объектов: Z1, Z2, Z3. Известны координаты их вершин. По
разработанной методике [2] построены их проволочные модели в виде кватернионных
сигналов:
Z1= D1={
13j; 0; 4i; 8i+13j; 1,7i+7j+7k; 4i+8k; 6,3i+7j+7k; 2i+8k};
Z2= D2={6j;0;
12i; 12i+6j; 4i+5j+12k; 8i+1j+12k;
8i+5j+12k; 4i+1j+12k};
Z3= D3={9j;
0; 13i; 12i+2j; 7j+4k; 10i+9k; 10i+2j+6k; 6k}.
Распознаваемый объект Q
получен путем поворота эталонного объекта Z2 на угол 110° вокруг
заданной оси вращения r =-2i+j+k:
Q= {-5i-0,7j-3,3k;
0; 6,6i-0,8j-10k;
1,6i-1,5j-13,2k;
-2,7i+11j-7,5k; 2,8i+11,3j-8,6k; -0,5i+10,8j-10,8k; 0,6i+11,5j-5,3k}.
Необходимо
решить задачу распознавания: какому эталонному объекту Z1, Z2, Z3 соответствует многогранный объект Q (рис.2).
а)
Рис. 2. Пример к задаче распознавания
трехмерных объектов: а) эталонные объекты; б) распознаваемый объект Q.
б)
Исследования проводились в двух режимах: без углового
согласования распознаваемого объекта с эталонными объектами и с угловым
согласованием распознаваемого объекта с эталонными объектами. Задача
распознавания решалась на основе сравнения значений мер схожести реального и
эталонного объекта. Были
получены следующие значения мер схожести реального объекта с эталонами:
|
Без углового
согласования |
После углового
согласования |
||||
|
Z1 |
Z2 |
Z3 |
Z1 |
Z2 |
Z3 |
|
0,664 |
0,653 |
0,710 |
0,899 |
0,9999 |
0,848 |
Вывод: максимальное значение меры
схожести, равное 0,9999,
получено после углового согласования и соответствует распознаваемому объекту Q и эталону Z2, что свидетельствует о том, что
распознаваемый объект принадлежит данному эталону. Решение о классе объекта - правильное. Без углового согласования
распознаваемого объекта с эталонными объектами решение о классе объекта
принимается ошибочное, это
связано с тем, что математическое
описание распознаваемого объекта изменяется при произвольном повороте и
сравнивать его с математическим описанием эталона не имеет смысла, поскольку
приводит к ошибочному решению.
Литература
1. Iterative Algorithm for Angular Matching of Group Point Objects with A
Priori Uncertainty of Parameters / Y. A. Furman, R.V. Eruslanov, I.L. Egoshina
// Pattern Recognition and Image Analysis. – 2013. - Vol. 23. - No. 3. – Pp.
381-388.
2. Различение трехмерных
объектов / Я.А. Фурман, И.Л. Егошина И.Л., Ерусланов Р.В. – Йошкар-Ола: Поволжский госуд. техн.
университет, 2013. – 260 с.