Технические науки/6. Электротехника и радиоэлектроника
д.ф.-м.н.
Будагян И.Ф., аспирант Костин М.С.
Московский
государственный технический университет радиотехники, электроники и автоматики (МГТУ МИРЭА), Россия
МАСШТАБНО-ВРЕМЕННОЕ
МОДЕЛИРОВАНИЕ СВЕРХКОРОТКОИМПУЛЬСНОГО ВИБРОМЕТРИЧЕСКОГО ЛОКАТОРА
Аннотация. Исследование виброакустических характеристик
конструктивных элементов кинематических и статических узлов устройств радиомеханики
требует применения высокоточных методов, обеспечивающих бесконтактную регистрацию
виброметрических параметров. Особый интерес в этой области сосредоточен на методах
сверхкороткоимпульсной радиолокации. Показателем воспроизводимости данных,
реализуемых системой радиолокации, служит спланированный эксперимент на базе
программной аналитической модели. При одновременном моделировании
быстроизменяющихся и медленно протекающих процессов на одной временной оси
можно столкнуться с ограничением процессорных ресурсов, поскольку шаг
дискретизации времени приходится выбирать из расчета минимального. В работе
предлагается реализация алгоритма с использованием двух дифференциальных
масштабов времени для каждого из процессов относительно оси выборки, что
существенно повышает эффективность вычислений.
Введение
Проектирование и анализ высокочувствительных приборов
и комплексов в области бесконтактных метрологических измерений характеристик механических
вибраций требует применения наиболее оптимальных технических решений и
численных методов обеспечения процесса зондирования, регистрации и обработки
виброметрических данных. Среди бесконтактных средств съема и регистрации
вибрационных параметров классифицируют три основных принципа косвенного
преобразования механических колебаний в сигнал: оптический, акустический и
радиоволновой. Основанные на этих физических явлениях преобразования аппаратные
средства съема, в том числе бесконтактные акселерометры, могут иногда
проигрывать по точности, а зачастую и вовсе – оказаться малопригодными для регистрации
колебаний элементов микромеханических устройств по ряду оговариваемых условий проведения
измерений. Ввиду актуализации развития перспективных инженерных направлений по
части применения специальных средств радиолокации, в последнее время особое
внимание сосредоточено на системах дистанционного радиомониторинга –
радиосенсорных радарах. Система радиосенсорной виброметрической локации представляет
собой радиоволновый программно-аппаратный комплекс на базе однокристального
приемопередатчика NVA6100 норвежской компании Novelda AS,
предназначенный для бесконтактного дистанционного зондирования поверхности
динамических и статических конструктивных элементов функциональных узлов
технических устройств точной радио- и микромеханики, генерирующих собственные
механические колебания или промодулированных внешними виброакустическими
возмущениями среды с целью регистрации динамических характеристик [1]. Получение абсолютных и статистических
информационных данных о вибрационных характеристиках (виброперемещении,
виброскорости, виброускорении, резонансах) микроэлектромеханических устройств,
радиоэлементов и конструкций также представляет одну из задач испытаний
аппаратуры на виброустойчивость и надежность при неразрушающем контроле и диагностике.
Инженерные исследования многопараметрических процессов
и сложных устройств априори предполагают планирование эксперимента с описанием математической
модели системы в целом. Одним из весовых критериев воспроизводимости ожидаемых результатов
данных при измерениях, является аналитическая модель системы радиосенсорного
локатора, посредством которой можно с достоверной точностью произвести
корреляционную оценку измерений при сравнении с теоретическими – численными
результатами программного моделирования. Основными требованиями, предъявляемыми
модели системы, являются ее адекватность,
однозначность по отношению к регламентируемым условиям эксперимента и
минимальные затраты ресурсов вычислительной микропроцессорной техники [2].
При одновременном моделировании быстроизменяющихся
(сверхкороткий импульс – нано- и пикосекундное колебание) и медленно
протекающих (механические вибрации – от миллисекундного до секундного цикла)
процессов на одной временной оси возникают трудности вычислений, которые сводят
в предел процессорные ресурсы ПЭВМ, поскольку шаг дискретизации времени
приходится выбирать из расчета минимального, т.е. для радиоимпульса, в то время
как конечная точка исследуемого процесса будет определяться низкочастотным
колебанием. Для решения подобного рода вычислительных задач существует ряд
способов: параллельные вычисления с применением специальных средств суперпроцессорной
техники или применение иных аналитических методов и алгоритмов. В работе
предлагается реализация модели в среде MatLab с использованием двух дифференциальных масштабов
времени для каждого из колебательных процессов в отдельности относительно оси
выборки.
Сверхкороткоимпульсная радиосенсорная
эхолокация
Из
всего разнообразия применяемых радиоволновых методов измерения вибраций
классифицируют следующие: резонаторные, интерференционные и фазовые. Для
приведенных методов, главным образом, можно выделить следующие недостатки обеспечения
генерации зондируемого сигнала и регистрации фиксируемых параметров. К ним
относятся: необходимость сохранения высокой стабильности частоты зондирующего
радиосигнала с целью уменьшения его флуктуации, повышения чувствительности и
качества работы системы; увеличение глубины проникающей способности
радиоимпульсов при реализации подповерхностной локации и обеспечение достаточно
удаленного от цели съема виброакустических параметров с требуемым разрешением.
Перечисленные недостатки в работе радиоволновых систем могут компенсироваться
за счет применения технологий, построенных на принципах сверхкороткоимпульсной
радиолокации, что в рамках современной науки способно решить многие радиотехнические
задачи с перспективой дальнейшей модернизации [3]. Так, с применением
радиоимпульсов наносекундной длительности, исключается необходимость
генерирования СВЧ сигнала заданной частоты так, как это принято в локаторах с
непрерывным и моноимпульсным действием, что кардинально исключает обеспечение
частотной стабилизации в высокочастотной области. Сверхкороткий широкополосный
радиоимпульс формируется как результат дифференцирования видеоимпульса
наносекундной длительности при его воздействии на сверхширокополосную антенну и
не имеет несущей частоты, а характеризуется длительностью, центральной частотой
и полосой спектра. Причем обязательным условием в выборе длительности
радиоимпульса, следовательно, и приемо-передающей антенны, является то, чтобы
амплитуда вибраций не превышала его фактической длины волны, так как в
противном случае это осложняется нелинейными искажениями принимаемого сигнала. В
таком случае остается лишь стабилизировать частоту дискретизации зондирования
(в том числе опорного сигнала), которую, для регистрации механических колебаний,
достаточно взять в диапазоне от сотен кГц до десятков МГц, что не составляет
особых затрат в техническом смысле реализации. Кроме того,
сверхширокополосность радиоимпульса улучшает энергетику сигнала, обеспечивает
требуемую проникающую способность и делает систему более помехоустойчивой к
воздействию внешних электромагнитных помех. Распределение во временной
последовательности выборки отраженных радиоимпульсов от вибрирующей цели описывается
законом фазовой модуляции, девиация которой отражает характеристику
плоскопараллельных колебаний вдоль линии визирования. Импульсное зондирование,
построенное на временном оконном стробировании, позволяет четким образом локализовать координатную привязку к
цели, тем самым максимальным образом исключив помехи от пространственно распределенных
поверхностей, генерирующих ложные эхосигналы, и восстановить в более явном виде
кривую колебательного закона исследуемой поверхности.
Обработка принимаемых эхосигналов в устройстве
осуществляется программным способом на базе оконного одномерного преобразования
Габора, путем накопления выборки радиоимпульсов, прошедших предварительное
усиление через пороговое устройство и скоростное АЦП. Прием сигнала
устанавливается с заданной частотой зондирования (стробирования) по задержке,
определяющей расстояние до потенциально расположенной цели [4,5].
Аналитическая модель радиосенсорного
локатора
Программный код скрипта описания
функциональной модели радиосенсорного виброметрического радара реализован в
среде MatLab и оформлен в виде m-файла, работа которого описывается наглядными
графиками процессов приема и обработки. Код программной модели предполагает
рассмотрение частного случая радиоимпульсного эхоприема сигнала от поверхности
вибрирующей цели при наличии гауссовых коррелируемых шумов от подстилающей
поверхности и элементов ограниченного пространства. Численный алгоритм приема и
обработки данных основаны на принципе определения дальности относительно
изменеия фазы отраженного сигнала [6]:
![]() (1)
(1)
Здесь![]() – разности фаз
при смещении поверхности объекта с расстояния R1 до R2;
fс – центральная частота радиоимпульса;
с – скорость света;
– разности фаз
при смещении поверхности объекта с расстояния R1 до R2;
fс – центральная частота радиоимпульса;
с – скорость света; ![]() – виброскорость объекта; (
– виброскорость объекта; (![]() ; F, A0 – частота и амплитуда
вибрации); TП =1/FП – период следования
зондируемых импульсов. При этом закон изменения частоты следования отраженных импульсов
имеет следующий вид [6]:
; F, A0 – частота и амплитуда
вибрации); TП =1/FП – период следования
зондируемых импульсов. При этом закон изменения частоты следования отраженных импульсов
имеет следующий вид [6]:
 (2)
(2)
где d – пространственное расстояние между импульсами вдоль
линии визирования, ![]() – угловая частота механических колебаний.
– угловая частота механических колебаний.
Достоверность принятого и отфильтрованного
эхосигнала определяется коэффициентом корреляции по отношению к заранее
известному произвольному (реперному) механическому колебанию. Работа алгоритма
программной модели проиллюстрирована нормированными графиками (рисунки 1,2). При
этом видеоимпульс, возбуждающий широкополосную антенну, аппроксимируется
функцией Гаусса:
 (3)
(3)
а излучаемый радиоимпульс – первой производной от функции (3):
 (4)
(4)
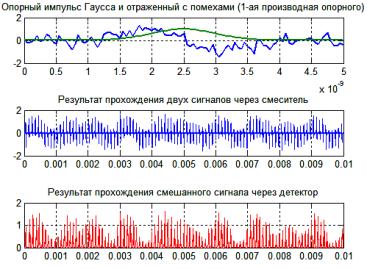
Рисунок 1 - Графическое представление сигналов
аналитической модели
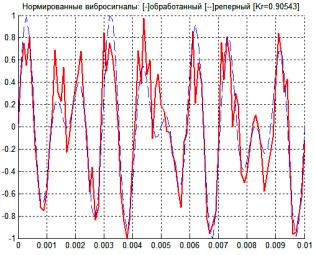
Рисунок 2 - Графическое представление реализации
эхосигнала от заданной цели (пунктиром указан реперный сигнал механического
колебания); коэффициент корреляции Kr = 0,905
Заключение
Радиосенсорный метод сбора параметров виброметрических данных способен
существенно расширить информативные возможности проведения научных и инжереных теоретических
и практических исследований в области бесконтактных радиоизмерений механических
вибраций методами сверкороткоимпульсной эхолокации. Предложенный метод
дифференциального масштаба во времени, реализованный на базе аналитической
модели радиосесорного радара, представленной системой мгновенно и медленно
протекающих процессов, позволяет повысить эффективность программных вычислений
и может быть полезным при отладке и тестировании численных методов обработки сигналов
в нелабораторных условиях. В перспективе планируется дальнейшее
совершенствование программной модели с целью реализации оптимальных способов
фильтрации сигнала для воостановления низкочастотной компаненты.
Литература
1.
Костин
М.С. Технологические аспекты
радиоволновой виброметрии при неразрушающем контроле несущих конструкций и
механизмов радиоэлектронных средств // Сборник трудов 62-й научно-технической
конференции МГТУ МИРЭА. – М.: МИРЭА, 2013. – с. 111 – 116.
2. Mahafza, Bassem R.
Radar systems & analysis and design using Matlab. – USA.: CHAPMAN &
HALL/CRC, 2009. – 533 p.
3.
Kinzie, Nicola Jean. «Ultra-Wideband Pulse Doppler Radar for Short-Range
Targets». PhD diss., University of
Colorado, 2011. – 305 p.
4.
Будагян
И.Ф., Костин М.С. Радиосенсорный
виброметрический локатор // Materiały IX Międzynarodowej naukowi-praktycznej konferencji «Wykształcenie i nauka bez granic - 2013». Techniczne nauki. – Przemyśl.: Nauka i
studia, 2013. – Vol. 46. – str. 31 –
35.
5.
Костин
М.С. Моделирование виброметрического СШП радара // Актуальные проблемы и
перспективы развития радиотехнических и инфокоммуникационных систем: Сб. научн.
тр.– М.: РАДИОИНФОКОМ, 2013. – Ч.1. – с.246 – 249.
6. James D. Taylor.
«Ultra-wideband Radar Technology» CRC
Press Boca Raton, London, New Work, Washington, 2000. – 424 p.