Технические науки / 4. Транспорт
Неженцев
А.Б.
Восточноукраинский
национальный университет им. В. Даля
потери
энергии в электроприводе подъёма крана
Проблему повышения эффективности энергопотребления
грузоподъемных кранов невозможно решить без совершенствования методов расчета
потерь энергии. В работах по теории электропривода [1, 2 и др.] используют
упрощенный подход, базирующийся на использовании одномассовой модели. Это не
позволяет исследовать влияние свойств металлоконструкции крана, канатов, высоты
подъема и др. факторов на потери энергии при подъеме грузов.
Цель исследования - разработка математической модели
грузоподъемного крана для расчета потерь энергии при подъеме груза с учетом
основных параметров электромеханической системы «привод – металлоконструкция –
груз».
Переходные процессы
при подъеме груза «с подхватом» краном мостового типа, представленного
трехмассовой динамической моделью [3], описываются
следующей системой дифференциальных уравнений:
1-й этап (выбор зазоров в механизме и слабины канатов)
![]() ; (1)
; (1)
2-й этап (изменение усилия в канатах от нуля до силы тяжести груза)
![]() ; (2)
; (2)
3-й этап (после отрыва груза от основания)
 (3)
(3)
где ![]() - приведенная к
канатам масса вращающихся частей механизма подъёма груза;
- приведенная к
канатам масса вращающихся частей механизма подъёма груза; ![]() и
и ![]() - коэффициенты
жесткости и затухания колебаний металлоконструкции крана;
- коэффициенты
жесткости и затухания колебаний металлоконструкции крана; ![]() и
и ![]() - коэффициенты
жесткости и затухания колебаний в канатах;
- коэффициенты
жесткости и затухания колебаний в канатах; ![]() - пути, проходимые
массами
- пути, проходимые
массами ![]() от начала координат;
от начала координат; ![]() – приведенная к канатам нелинейная сила привода [4].
– приведенная к канатам нелинейная сила привода [4].
Потери мощности в асинхронном электродвигателе
![]() , (4)
, (4)
где ![]() и
и ![]() - постоянные и переменные потери;
- постоянные и переменные потери; ![]() и
и ![]() - переменные потери соответственно
в обмотке статора и в цепи ротора;
- переменные потери соответственно
в обмотке статора и в цепи ротора; ![]() - скорость привода,
соответствующая синхронной частоте вращения двигателя
- скорость привода,
соответствующая синхронной частоте вращения двигателя ![]() ;
; ![]() – скольжение;
– скольжение; ![]() - приведенное активное сопротивление фазы ротора.
- приведенное активное сопротивление фазы ротора.
Суммарные потери энергии в асинхронном приводе в общем виде
![]() ,
(5)
,
(5)
где ![]() ,
, ![]() и
и ![]() - потери энергии, обусловленные соответственно постоянными
потерями, переменными потерями в статоре и роторе;
- потери энергии, обусловленные соответственно постоянными
потерями, переменными потерями в статоре и роторе; ![]() – время переходного
процесса.
– время переходного
процесса.
Суммарные потери
энергии в двигателе на первом этапе
![]() . (6)
. (6)
Суммарные потери
энергии в двигателе на втором этапе
![]()
![]() . (7)
. (7)
Суммарные потери
энергии в двигателе на третьем этапе
![]()
![]()
![]()
![]() . (8)
. (8)
Потери энергии за весь
период подъема груза
![]() . (9)
. (9)
Совместное интегрирование уравнений (1 - 3) и (6-9) численным методом с помощью компьютерной программы [3] позволяет с высокой точностью рассчитывать значения потерь энергии (см. рис. 1), а также нагрузок металлоконструкции и канатов при подъеме груза в двигательных и тормозных режимах.
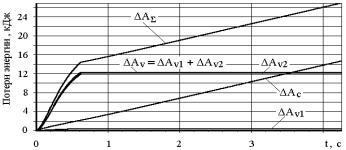
Рис. 1. Потери энергии при подъеме мостовым краном груза 20т
Анализ графиков показывает, что переменные потери
энергии ![]() изменяются только в
период разгона электропривода. В дальнейшем их величина остается неизменной.
При этом суммарные переменные потери
изменяются только в
период разгона электропривода. В дальнейшем их величина остается неизменной.
При этом суммарные переменные потери ![]() определяются в
основном потерями в цепи ротора
определяются в
основном потерями в цепи ротора ![]() (переменные потери в
статоре
(переменные потери в
статоре ![]() не превышают 4-5% от
суммарных переменных потерь). На рис. 1 видно, что постоянные потери энергии
не превышают 4-5% от
суммарных переменных потерь). На рис. 1 видно, что постоянные потери энергии ![]() изменяются прямо
пропорционально времени подъема груза и составляют значительную часть в
суммарных потерях. Так при подъеме груза массой 20т на высоту 0,5м постоянные
потери энергии составляют 54%, а при подъеме того же груза на высоту 2м – превышают
81%.
изменяются прямо
пропорционально времени подъема груза и составляют значительную часть в
суммарных потерях. Так при подъеме груза массой 20т на высоту 0,5м постоянные
потери энергии составляют 54%, а при подъеме того же груза на высоту 2м – превышают
81%.
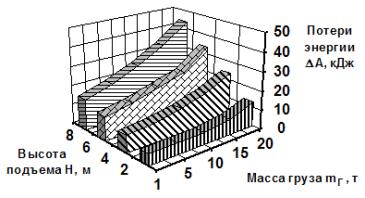
Рис. 2. Зависимости
потерь энергии в приводе подъема мостового крана
от высоты подъема Н и массы груза mг
На рис. 2 приведены графики зависимостей потерь энергии ![]() в электроприводе мостового крана
грузоподъемностью 20т от высоты подъема Н и массы груза mг. Эти
графики очень удобны для инженерной практики, так как позволяют на стадии
проектирования крана оценить потери энергии при подъеме различных по массе
грузов на заданную высоту.
в электроприводе мостового крана
грузоподъемностью 20т от высоты подъема Н и массы груза mг. Эти
графики очень удобны для инженерной практики, так как позволяют на стадии
проектирования крана оценить потери энергии при подъеме различных по массе
грузов на заданную высоту.
Проведенные
исследования позволили сделать следующие выводы:
- расчет потерь
энергии грузоподъёмных кранов надо осуществлять с помощью методики, учитывающей
основные параметры системы «привод – металлоконструкция - груз», что повышает
точность расчета на 13 – 25%;
- поскольку в
механизмах подъема приведенная к канатам масса вращающихся частей на порядок
превышает массу груза, то потери энергии в основном зависят от момента инерции
ротора и муфт на быстроходном валу. В меньшей мере они зависят от массы груза
(отличие потерь энергии при подъеме номинального груза 20т и пустого крюка меньше
25%). Поэтому для снижения энергопотребления кранов и улучшения условий
обработки грузов (за счет пониженных скоростей) целесообразна установка
дополнительного микропривода;
- разработанная
методика, позволяет не только рассчитывать потери энергии в электроприводах
подъема кранов, но и выбирать наиболее экономичные по энергопотреблению
параметры механизмов на стадии проектирования.
Литература
1.
Чиликин М.Г. и др.
Основы автоматизированного электропривода. - М.: Энергия, 1974. - 568с.
2.
Москаленко В.В.
Автоматизированный электропривод. – М.: Энергоатомиздат, 1986. – 416с.
3.
Аветисян С.М., Неженцев
А.Б. Программное обеспечение для исследования
переходных процессов грузоподъемных кранов (часть 2: при работе механизмов
подъема грузов // Підйомно-транспортна техніка, № 1(9). - Дніпропетровськ, 2004. – с. 83-95.
4.
Будиков Л.Я., Неженцев
А.Б., Фоменко Г.П. К вопросу об учете движущей (тормозной) силы асинхронного
электропривода в динамических моделях грузоподъемных кранов // Вісник Східноукр. держав. ун-ту, №2(18), серія
Промисловий транспорт. - Луганськ: Вид-во СУДУ, 1999. - с.170-178.