К.т.н.
Неженцев А.Б., Аветисян
С.М.
Национальный технический университет Украины "Киевский
политехнический
институт имени Игоря Сикорского"
динамические нагрузки при опускании грузов мостовыми
кранами
Решение
задачи снижения динамических нагрузок в металлоконструкциях кранов и канатах
при опускании грузов может быть осуществлено путем формирования механических
характеристик электроприводов подъема в режиме динамического торможения. Однако,
не смотря на очевидные преимущества динамического торможения при опускании
грузов, указанный режим используется редко из-за неопределенности настроек
механических характеристик в режиме динамического торможения. Необоснованный
выбор механических характеристик в этом режиме может привести к значительному
увеличению времени опускания груза, или не позволит снизить динамические нагрузки.
Публикаций,
в которых исследуются переходные процессы в период опускания грузов в режиме
динамического торможения практически нет. Вместе с тем, в рабочем цикле
механизма подъема процессы опускания груза занимают значительно больше времени
(т.е. больше влияют на производительность кранов), чем процессы подъема, и
являются более опасными как с позиции сохранности транспортируемых грузов, так
и безаварийности при «посадке» грузов.
Цель
работы: анализ влияния различных факторов на динамические нагрузки при
опускании груза краном в режиме динамического торможения.
Процесс
опускания груза состоит из нескольких этапов:
-
опускание груза при работе двигателя в режиме силового спуска;
-
опускание груза при работе двигателя в генераторном режиме;
-
опускание груза при работе двигателя в режиме динамического торможения до момента
касания грузом основания;
-
ослабление канатов и разгрузка металлоконструкции крана после того как груз
коснулся основания.
Переходные
процессы при опускании груза краном, представленного трехмассовой
схемой, описываются нелинейными дифференциальными уравнениями, в которых приведенная
к канатам сила привода ![]() определяется:
определяется:
-
в двигательном и генераторном режимах при опускании груза
 ;
(1)
;
(1)
-
в режиме динамического торможения
 ,
(2)
,
(2)
где
![]() ;
; ![]() - постоянные для j-ой искусственной характеристики двигателя;
- постоянные для j-ой искусственной характеристики двигателя;
![]() - критический момент;
- критический момент; ![]() - критическое скольжение на j-ой механической характеристике;
- критическое скольжение на j-ой механической характеристике;
![]() - скорости груза, соответствующие синхронной и текущей частотам
вращения ротора двигателя;
- скорости груза, соответствующие синхронной и текущей частотам
вращения ротора двигателя; ![]() - передаточное число привода;
- передаточное число привода; ![]() - радиус барабана;
- радиус барабана; ![]() - КПД механизма
подъема.
- КПД механизма
подъема.
Для
интегрирования систем нелинейных дифференциальных уравнений совместно с
выражениями (1), (2) численным методом разработана многофункциональная компьютерная
программа, позволяющая с высокой точностью рассчитывать значения и строить
графики изменения перемещений, скоростей и ускорений приведенных масс крана и
груза, нагрузок в металлоконструкции крана и канатах при опускании грузов в
различных режимах.
Для
кранов различной грузоподъемности было исследовано множество переходных
процессов при опускании грузов. В результате их обработки построен ряд
графиков, отражающих зависимости коэффициента динамичности металлоконструкции
крана ![]() , коэффициента динамичности в канатах
, коэффициента динамичности в канатах ![]() , времени опускания номинального груза и др. параметров от
высоты опускания груза Н и механических характеристик электропривода (М.х.
№1-№5) в режиме динамического торможения. На рисунке приведены типичные графики
зависимостей коэффициентов динамичности
, времени опускания номинального груза и др. параметров от
высоты опускания груза Н и механических характеристик электропривода (М.х.
№1-№5) в режиме динамического торможения. На рисунке приведены типичные графики
зависимостей коэффициентов динамичности ![]() и
и ![]() от указанных факторов.
от указанных факторов.
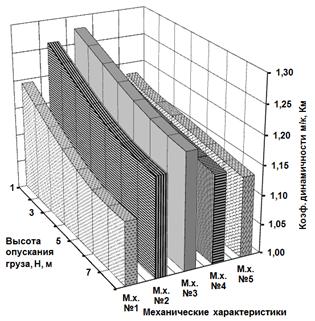
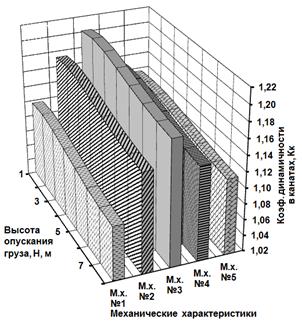
Рисунок - Графики зависимостей ![]() и
и ![]() от высоты и
механических
от высоты и
механических
характеристик при опускании груза в режиме динамического торможения
Анализ
результатов исследований при опускании груза показал, что в отличие от подъема
«с подхватом» коэффициенты динамичности нагрузок в канатах ![]() и металлоконструкции
крана
и металлоконструкции
крана ![]() зависят от высоты
опускания Н. Они уменьшаются до 9% при увеличении высоты опускания до 8м.
Наименьшие коэффициенты динамичности
зависят от высоты
опускания Н. Они уменьшаются до 9% при увеличении высоты опускания до 8м.
Наименьшие коэффициенты динамичности ![]() и
и ![]() были получены при
опускании по первой механической характеристике, наибольшие – по третьей.
Отметим, что самым быстрым спуск груза был на первой механической характеристике,
а наиболее медленным – на пятой. Применение динамического торможения по сравнению
с торможением колодочным тормозом при опускании грузов позволяет снизить
уровень максимальных динамических нагрузок более чем в 1,3 – 2 раза при
уменьшении числа включений электропривода в 2 - 3 раза.
были получены при
опускании по первой механической характеристике, наибольшие – по третьей.
Отметим, что самым быстрым спуск груза был на первой механической характеристике,
а наиболее медленным – на пятой. Применение динамического торможения по сравнению
с торможением колодочным тормозом при опускании грузов позволяет снизить
уровень максимальных динамических нагрузок более чем в 1,3 – 2 раза при
уменьшении числа включений электропривода в 2 - 3 раза.
Разработанные
математические модели мостового крана и программное обеспечение позволяют с
высокой точностью рассчитывать нагрузки в металлоконструкции и канатах,
перемещения, скорости и ускорения приведенных масс крана и груза при опускании
последнего в различных режимах.