Технічні науки / Транспорт
Божок А.М.,
Майсус В.В., Венгер М.А., Волинкін М.П.
Подільський
державний аграрно – технічний університет
Можливості підвищення прохідності й тягово – зчіпних якостей ходового
апарату гусеничного мобільного енергетичного засобу
Покращення
прохідності і тягово – зчіпних якостей, а також зниження шкідливої дії на грунт
ходових апаратів (ХА) є однією з проблем удосконалення сучасних мобільно –
енергетичних засобів (МЕЗ). Відомі принципово нові (А. С. СРСР №1675153,
1763280 та інш.) технічні рішення ХА, забезпечуючі більш рівномірний, в
порівнянні з серійними, характер розподілу тиску по всій поверхні контакту їх з
грунтом, реалізація яких не вносить істотних змін в конструкцію МЕЗ. Проте
недоліком їх є низький ступінь плавності руху і точність пересування до грунту
на високих швидкостях переміщення МЕЗ по пересічній місцевості.
У зв’язку з цим для покращення
динамічних властивостей пропонується удосконалення ХА, шляхом більш точного
формування і подачі на механізм підвіски компенсуючих регулюючих сигналів
пропорційних не тільки змінюванню величин поштовхів і ударів з боку перешкод,
але й швидкості їх змінювання.
Запропонований удосконалений ХА містить
раму 43 (рис.1.а) МЕЗ з ведучим 19 і веденим 42 колесами, на яких розміщена
нескінченна гусенична стрічка 32, утворена ланками 31, шарнірно зв’язаних між
собою пальцями 25. На рамі 43 між колесами 19, 42 закріплені двоплечі важелем
1, 20, до нижніх кінців яких шарнірно приєднана пружна стрічка 30 з опорними
котками 22, а верхні плечі важелів 1, 20 зв’язані основним 5 і додатковим 29
диференціюючим гідроциліндром. Порожнина “А” гідроциліндра 5 з порожниною “Б” гідроциліндра
29 сполучена гнучкою 12 і жорсткою 7 гідролініями безпосередньо, а з
порожниною. “В” – через жорстку
гідро лінію 7 і регулювальний дросель 10. Рухомі поршні 14, 28 шарнірно
з’єднані із нижнім плечем і середньою точкою підсумовуючого важеля 18, верхнє
плече якого тягою 17 зв’язане з важелем 20.
Для підтримання верхньої вітки
гусеничної стрічки 32 використовуються підтримуючі ролики 4, 15, а для
повернення рухомих поршнів 6, 14, 28 у вихудне положення - пружини 2, 16 ,27.
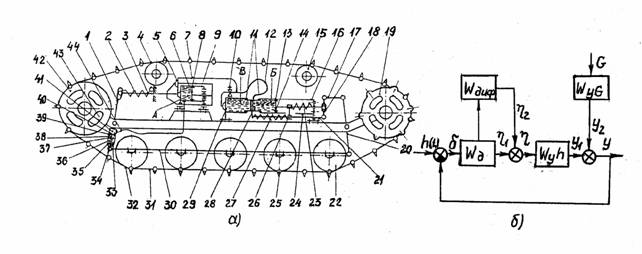
Рис. 1. Схема удосконаленого ходового апарату
гусеничного МЕЗ:
а) принципова; б) структурна; 1 – передній важіль;
2, 16, 27, 36 – пружини; 3, 23, 28 – штоки; 4, 15 – підтримуючі ролики; 5 –
основний гідроциліндр; 6, 14, 28, 40 – рухомі поршні; 7, 12, 44 – гідролінії;
8, 11, 13, 39 – ущільнення; 9, 24 – кожух; 10 – регульований дросель; 17, 21 –
тяги; 18 – підсумовуючий важіль; 19 – ведуче колесо; 20 – задній важіль; 6, 22
– опорні котки; 25 – пальці; 26 – важіль; 29 – диференціюючий гідроциліндр, 30
– пружна стрічка, 31 – ланка; 32 – гусенична стрічка; 34 – регулювальна гайка;
35 – сідло; 37 – упор; 41 – гідравлічний датчик; 42 – ведене колесо; 43 – рама;
“А”,”Б”,”В” – порожнини.
Герметичність у з’єднуваних парах гідроциліндрів 5, 29 забезпечується
ущільненнями 8, 11, 13.
При русі МЕЗ по горизонтальній
поверхні, без розміщених вище, або нижче на ній перешкод, його вага через раму
43, важелі 1,20, пружну стрічку 30 й опорні котки 22 передається на гусеничну
стрічку 32, забезпечуючи рівномірний питомий тиск на грунт, аналогічний тиску
при встановленні котків 22 на жорстку балку.
У випадку наїзду гусеничної стрічки 32
на перешкоду, розміщену, наприклад, вище горизонтальної поверхні, вона буде
копіювати її профіль. При цьому та складова опорної реакції, з боку перешкоди ,
що направлена вздовж важеля 1, здолавши зусилля пружини 36, через шток 38
перемістить поршень 40, різко підвищувати тиск робочої рідини у без штоковій
порожнині датчика 41 і далі через гнучку гідролінію 44 - у порожнині “А”, а друга складова, що перпендикулярна важелю 1,
через нижнє поверне його верхнє плече, і
здолавши зусилля пружини 2, через шток 3 перемістить поршень 6 вліво ще додатково
підвищить тиск у ній. Тому результуючий тиск у порожнині “А” завжди буде
пропорційний величині опорної реакції від дії перешкоди на передні ланки
гусеничної стрічки 4.
Далі через гідролінію 7 робоча рідина
із порожнини “А” гідроциліндра 5
буде поступати в порожнини “Б”,”В”,
диференціюючого гідроциліндра 29. Крім цього, по мірі руху МЕЗ, на перешкоду
будуть наїжджати наступні ланки і опорні котки, вигинаючи гусеничну стрічку 32
і, разом з цим, пружну стрічку 30 настільки, що нижнє плече важеля 20 також
почне повертатися, а його протилежне плече через тягу 17, підсумовуючий важіль
18, шток 23, здолавши зусилля пружини 16, буде прагнути перемістити крайній
рухомий поршень 14 гідроциліндра 29 вправо, для забезпечення прогину гусеничної
стрічки 32 і пружної стрічки 30 не величину необхідну для вільного огинання
розміщеної над поверхнею перешкоди. Цьому буде сприяти випереджаюча дія, раніше
поступаючого по гідролінії 7 від гідроциліндра 5, тиску робочої рідини в його
порожнині “А”. Але через
наявність дроселя 10 тиск в порожнині “В” гідроциліндра 29 буде зростати повільніше ніж у
порожнині “Б”, що спричинить
певну затримку в переміщенні рухомого поршня 28 і, зв’язаного з ним тягою 21
середньої частини підсумовуючого важеля 18, що приведе до певного розтягування
пружини 27 через різні швидкості руху пов’язаних з нею поршнів 14, 28. Різке
переміщення середньої частини важеля 18 перемістить його верхній кінець і через
тягу 17 – протилежне плече важеля 20 вправо, для забезпечення необхідного
прогину гусеничної стрічки 4 і пружної стрічки 30 на величину вільного огинання
перешкоди. Однак, цієї величини переміщення стає недостатньо для вільного (без
ударів і поштовхів) огинання перешкоди в перехідному процесі роботи ХА,
оскільки сформований в гідроциліндрі 5 сигнал, який далі поступив з порожнини “А”
у вигляді приросту тиску робочої рідини в порожнині “Б”, тільки пропорційний
зміні величини дії збоку перешкоди.
Тому певна затримка і розтягування
пружини 27 в початковий момент перехідного процесу, рухомого поршня 28, а разом
з ним нижнього кінця підсумовуючого важеля 18 спричинить додаткове
переміщення його верхнього кінця через
тягу 17 – переміщення протилежного плеча важеля 20, яке буде пропорційне швидкості
(першій похідній) змінювання дії з боку перешкоди.
Таким чином, результуюче переміщення
протилежного, від зв’язаного із пружною стрічкою 30, плеча важеля 20 в даному
випадку буде складатись із двох переміщень: першого переміщення, пропорційного
величині змінювання дії на ХА з боку перешкоди і другого переміщення,
пропорційного швидкості (першій похідній) змінювання дії з боку перешкоди. Таке
переміщення в перехідному процесі ХА своєчасно звільнить пружну стрічку 30 на
величину, забезпечуючу підвищений ступінь плавності руху МЕЗ і точність
пристосування ХА до грунту.
По мірі стабілізації дії з боку
перешкоди пружина 27 перемістить поршні 14, 28 настільки, що підсумовуючий
важіль 18 займе вертикальне положення, а складова переміщення, пропорційна
швидкості зміни дії перешкоди зникне, при забезпеченні складової переміщення
пропорційної тільки її змінюванню.
Чим різкіше буде змінюватись
дія з боку перешкоди, тим більшою буде складова пропорційна швидкості її зміни,
а отже, з більшою інтенсивністю, завдяки точнішому вимірюванню гідравлічним
датчиком опорних реакцій, буде
змінюватись податливість пружної стрічки і більш ефективно, ніж у відомого ХА,
буде змінюватись її компенсація, забезпечуючи цим підвищену ступінь плавності
руху на великих швидкостях і поганих дорогах, а також підвищену точність
пристосування до ґрунту запропонованого ХА гусеничного МЕЗ.
Ступінь інтенсивності
введення компенсуючого сигналу, пропорційного швидкості (першій похідній)
змінювання дії перешкоди, здійснюється настроюванням регульованого дроселя 10.
Повороти, задній хід та інші маневри
МЕЗ із запропонованим ХА будуть виконуватись аналогічно до МЕЗ оснащеного
відомим гусеничним ХА.
Плавність руху і точність пристосування
до грунту ХА залежить від ступеня натягу пружної стрічки і є регульованим параметром. В перехідному
процесі цей параметр підтримується системою автоматичного регулювання натягу (САРН).
На структурній схемі САРН (рис. 1,б)
представлені передаточні функції: пружної стрічки, як об’єкта регулювання по
каналу дії з боку, перешкоди – Wyh і дії ваги МЕЗ
– WhG , датчика величини поштовхів та ударів,
з боку діючих перешкод на гусеничну стрічку – Wд і
диференціюючого виконавчого гідроциліндра – Wдиф.
Вихідними координатами є дія з боку перешкоду h (t) на
поверхні дороги і вага МЕЗ G, а вихідною –
натяг пружної стрічки у. Координати зв’язку
![]() ,
, ![]() ,
,![]() - відповідно вихідне і вхідні переміщення крайніх і
середньої точок підсумовуючого важеля;
- відповідно вихідне і вхідні переміщення крайніх і
середньої точок підсумовуючого важеля; ![]() - натяг пружної стрічки
відповідно результативний і спричинений дією з боку перешкоди і ваги МЕЗ;
δ – розбіжність в сигналах з боку перешкоди і зворотного зв’язку.
- натяг пружної стрічки
відповідно результативний і спричинений дією з боку перешкоди і ваги МЕЗ;
δ – розбіжність в сигналах з боку перешкоди і зворотного зв’язку.
Залучення до ХА гідравлічного датчика
при будь – яких поштовхах і ударах з боку перешкод, дає можливість
вимірювати і гідравлічно підсумовувати
компенсуючи регулюючі сигнали з більшою точністю, пропорційні складовим опорних
реакцій котків, і тим самим підвищити прохідність і тягово – зчіпні якості ХА
гусеничного МЕЗ.
Література
1. Бесекерський
В.А., Попов Е.П. Теория систем автоматического регулирования. 2 – е издание, исправ. и доп. – М.: Наука, 1972,
Автори: А.М. Божок В.В. Майсус
М.А. Венгер М.П.
Волинкін