Технические науки / 6. Электротехника и радиоэлектроника
К.т.н. Сухарьков О.В.
Одесская национальная академия связи им.
А.С. Попова, Украина
Гидроакустическая рупорная антенна вертикальной ориентации
Важной проблемой
информационной гидроакустики является разработка антенн передающих трактов
дальней цифровой связи [1, 2]. Основными
элементами излучающих антенн могут служить низкочастотные ![]() жидкоструйные
преобразователи с круговым щелевым соплом в виде соосных дисков [3]. Доклад посвящен разработке рупорной антенны
вертикальной ориентации для передачи дискретной информации между подводными
лодками, находящимися на различной глубине, а также для связи между надводными
кораблями, подводными лодками и необитаемыми гидроакустическими комплексами,
находящимися на дне моря.
жидкоструйные
преобразователи с круговым щелевым соплом в виде соосных дисков [3]. Доклад посвящен разработке рупорной антенны
вертикальной ориентации для передачи дискретной информации между подводными
лодками, находящимися на различной глубине, а также для связи между надводными
кораблями, подводными лодками и необитаемыми гидроакустическими комплексами,
находящимися на дне моря.
Схема основного
элемента рупорной
антенны представлена на рис. 1.
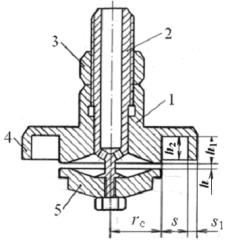
Рисунок 1 – Схема
жидкоструйного преобразователя
Преобразователь содержит:
корпус 1 с кольцевой проточкою и ступенчатым препятствием 4, обтекатель 5,
штуцер 2 для подвода рабочей жидкости, контргайку 3. Регулировка ширины ![]() щели кругового
сопла выполняется путем перемещения
корпуса 1 по штуцеру 2 с последующей фиксацией корпуса 1 контргайкой 3.
Изменение ширины кольцевой проточки
щели кругового
сопла выполняется путем перемещения
корпуса 1 по штуцеру 2 с последующей фиксацией корпуса 1 контргайкой 3.
Изменение ширины кольцевой проточки ![]() , а также других
геометрических параметров преобразователя (
, а также других
геометрических параметров преобразователя (![]() ,
, ![]() ,
, ![]() ,
, ![]() ) производится за счет замены корпуса 1 и обтекателя 5. В качестве акустической модели данного
преобразователя предложена модель автоколебаний затопленной плоской осесимметричной
струи жидкости [3]. На рис. 2 представлена схема
разработанной гидроакустической антенны
[4].
) производится за счет замены корпуса 1 и обтекателя 5. В качестве акустической модели данного
преобразователя предложена модель автоколебаний затопленной плоской осесимметричной
струи жидкости [3]. На рис. 2 представлена схема
разработанной гидроакустической антенны
[4].
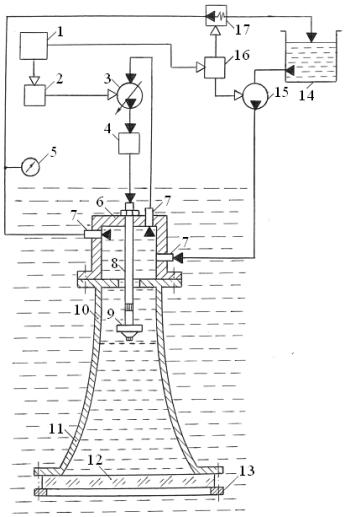
Рисунок 2 –
Схема рупорной антенны вертикальной ориентации
Рупорная антенна представляет собой герметичную
емкость и
содержит жидкоструйный преобразователь 9, цилиндрическую камеру 6 для
компенсации гидростатического давления окружающей морской среды,
предрупорную камеру 10 в виде
цилиндрического волновода с фланцем, выполненную совместно с рупором 11
катеноидальной формы, звукопрозрачное окно 12. Преобразователь 9 установлен на
штуцере 8 в вертикальной плоскости внутри предрупорной камеры 10, перпендикулярно ее фланцу. При
этом зона звукообразования преобразователя 9 расположена на оси волновода на
расстоянии от фланца камеры 10 равном четверти длины волны,
соответствующей первой гармонике продольного резонанса заполненного рабочей
жидкостью волновода [5]. Камера 6 герметично установлена на фланце предрупорной камеры 10. С целью компенсации статического
давления во внутренней полости антенны во фланце камеры 10 выполнено
центральное отверстие, диаметр которого составляет 0,90…0,94 наружного диаметра
корпуса преобразователя 9, при этом отношение диаметра штуцера 8
преобразователя к наружному диаметру его корпуса равно 0,52…0,58. Камера 6 содержит патрубки 7 для
соединения с входом аксиально-поршневого насоса 3, с выходом вспомогательного
насоса 15 и для соединения с емкостью
14 рабочей жидкости. В апертуре рупора 11 с помощью прижимного кольца 13
установлено круглое звукопрозрачное окно 12, изготовленное из акустически
прозрачной резины.
Все конструктивные
металлические элементы предлагаемой гидроакустической
антенны и соединительные трубопроводы изготавливаются из нержавеющей стали,
например, Х18Н10Т. Для питания преобразователя 9 в качестве рабочей жидкости
используется трансформаторное масло. Наиболее важным свойством
трансформаторного масла является его стабильность против окисления, т. е.
способность сохранять свои параметры при длительной работе. В нерабочем
состоянии внутренняя полость антенны полностью заполнена предварительно
отфильтрованным и дегазированным трансформаторным маслом, при этом апертура
антенны герметично закрыта стальной крышкой (на
рис. 2 не показана).
Работа антенны осуществляется
следующим образом. При включении питания центральный процессор персонального
компьютера 1 (см. рис. 2) выполняет специально разработанную программу,
управляющую исполнительными механизмами 2 и 16. С помощью исполнительного
механизма 16 вначале включается вспомогательный насос 15, который
создает в камере 6 и, соответственно, во всей внутренней полости антенны
статическое давление равное по величине гидростатическому давлению окружающей
морской среды на глубине погружения антенны. Регулировку статического давления
осуществляет исполнительный механизм 16, управляющий регулируемым клапаном 17.
Избыточное трансформаторное масло поступает в емкость 14. Статическое давление
внутри рупорной антенны контролируется образцовым манометром 5. После этого
автоматически открывается крышка, закрывающая апертуру антенны. Далее исполнительный механизм 2 включает насос 3 и устанавливает величину
расхода рабочей жидкости, соответствующую оптимальной скорости истечения
струи из сопла преобразователя 9 [6]. В этом случае преобразователь 9 генерирует тональный звуковой сигнал, состоящий из
последовательности отдельных коротких экспоненциальных
импульсов. Уровень генерируемого
акустического сигнала зависит от режима истечения струи, геометрических
параметров преобразователя и величины гидростатического давления на заданной
глубине [4, 6].
Затем выполняется считывание передаваемого
дискретного сигнала с носителя персонального компьютера 1. Манипуляция
несущей частоты звукового сигнала реализуется путем регулирования оптимальной
скорости струи за счет программируемого управления центральным процессором компьютера
1 работой исполнительного механизма 2. Таким образом, несущая частота звукового импульсного сигнала преобразователя
9, согласно программе, модулируется
передаваемым дискретным
информационным сигналом. В результате генерируемый акустический сигнал
превращается в комбинацию импульсных последовательностей с разными звуковыми
частотами, одна из которых соответствует уровню логического "нуля", а
вторая соответствует уровню логической "единицы" в фиксированные
интервалы времени [2]. При этом рупорная антенна выполняет
направленное в вертикальной плоскости излучение модулированного звукового
сигнала. На приемной
стороне акустические сигналы, с помощью гидрофонов, преобразуют в электрические
сигналы и измеряют периоды импульсных последовательностей этих сигналов в четко
определенные интервалы времени. Далее осуществляют идентификацию единиц и нулей
кодовой комбинации, передаваемой в канале связи, и записывают принятую
информацию на носитель приемной аппаратуры. Конечный этап
обработки включает в себя декодирование и представление информационного
сообщения в удобном для слухового или зрительного восприятия виде.
Испытание опытного образца
рупорной антенны показало, что при частоте импульсного сигнала ![]() девиация частоты
девиация частоты ![]() позволяет передавать
дискретную информацию со скоростью
позволяет передавать
дискретную информацию со скоростью ![]() .
.
Литература:
1. Сухарьков О.В. Гидроакустическая излучающая
рупорная антенна на основе
жидкоструйного преобразователя / О.В. Сухарьков // Акустичний вісник. – 2011. – 14, № 1. – С. 56 – 63.
2.
Сухарьков О.В. Передача
дискретной информации в гидроакустический канал связи с использованием жидкоструйных
преобразователей / О.В. Сухарьков // Цифрові технології. – 2011. – № 9. – С. 100 – 110.
3. Сухарьков О.В. Модель жидкоструйного
излучателя с круговым щелевым соплом в виде соосных дисков / О.В. Сухарьков //
Наукові праці ОНАЗ ім. О.С. Попова. – 2011. – №2. – С. 107 – 113.
4. Пат. 100212 Україна, МПК′ B06B 1/00, H04R 1/00. Гідроакустична рупорна антена / Сухарьков О. В.; заявник і
патентовласник Одеська національна академія зв'язку ім. О. С. Попова. – № a 2011 15013 ; заявл. 19.12.11,
опубл. 26.11.12, Бюл. № 22.
5. Скучик Е. Основы акустики / Е.
Скучик / [пер. с англ., ред. Л. М. Лямшев]. – М. : Мир,
1976. – 2. – 542 с.
6. Сухарьков О.В. Энергетические характеристики затопленной кольцевой струйной
пластинки при наличии развитой кавитации / О.В. Сухарьков // Акустичний вісник. – 2010. – 13, № 2. – С. 45 – 52.