Технические науки / 5. Энергетика
Breydo
I.V., Makarenko N.V.
BOUNDARIES OF D.C. ELECTRIC DRIVE STABILITY AT POWER SUPPLY FROM
COMPARABLE POWER SOURCE
Power supplying a thyristor drive of a number
of mining machines is done from independent and dependent sources having the
power comparable with an electric motor power. For such conditions a
considerable (up to 40%) change of a.c. voltage amplitude in the mains is characteristic
which results in the deformation of
static and dynamic characteristics of the electric drive, as well as in
pseudoswitchings-off connected with the breakdown of the thyristor converter operation.
The carried out investigations of a
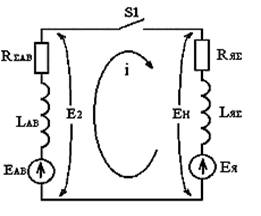
Fig.1.
Equivalent circuit of electric drive power part
In the equivalent circuit EAB - is an e.m.f. source, LAB - is an equivalent inductance,
S1 - is a key the control of which is
fulfilled taking into account the
conditions and the phase control system operation. Proceed from the thyristors commutation conditions the key S1simulating them
(Fig.1) is closed when the instantaneous
value of the motor armature e.m.f.
and the voltage drop in its circuit EH is less than the
instantaneous e.m.f. value in the
input of the controlled rectifier E2. Thus the commutation
conditions of the key S1 are described by the following relations:
Е2 < ЕН - the key S1
is broken; (1)
Е2 > ЕН - the key S1
is closed.
Consider
a single-circuit system of speed controlling when the key is closed, i.e. Е2 > ЕН, then:
 (2)
(2)
![]()
![]()
where ![]() ;
; ![]() ;
; ![]() =ЕАВ/ЕAN;
=ЕАВ/ЕAN; ![]() =ЕA/ ЕAN;
=ЕA/ ЕAN; ![]() =i/iN;
rSS=RSАВiN/ЕAN - is
the relative resistance of the supply source;
=i/iN;
rSS=RSАВiN/ЕAN - is
the relative resistance of the supply source; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ; ЕAN=СФNwN, ФN, wN, ЕN, iN - are nominal values of the
armature e.m.f., the magnetic flux, the angular velocity, the
voltage and the motor armature current respectively; C - is a constructive
motor constant;
; ЕAN=СФNwN, ФN, wN, ЕN, iN - are nominal values of the
armature e.m.f., the magnetic flux, the angular velocity, the
voltage and the motor armature current respectively; C - is a constructive
motor constant; ![]() - is a
total magnetic flux of the poles ;
- is a
total magnetic flux of the poles ; ![]() - is an
angular motor velocity; MR - is a moment of resistance of the motor;
MN - is a nominal value of the motor electric and magnetic moment; J - is a moment of inertia
driven to the motor shaft;
- is an
angular motor velocity; MR - is a moment of resistance of the motor;
MN - is a nominal value of the motor electric and magnetic moment; J - is a moment of inertia
driven to the motor shaft; ![]() ;
; ![]() ; КSC, КТC -
are the coefficients of the speed controller and the thyristor
converter.
; КSC, КТC -
are the coefficients of the speed controller and the thyristor
converter.
At ![]() ; MR=0,
ТSS=0,
(2) takes on the form:
; MR=0,
ТSS=0,
(2) takes on the form:
 (3)
(3)
![]()
![]()
where K1 = КSC/ КТC -
is a coefficient of the speed control system.
The system stability condition can be derived from solving the following
inequality:
![]() <0,
<0,
where К2=ТМρA -
is a constructive coefficient of the
motor; КSS=ρSS/ρA - is a coefficient of the supply source.
According
to Gurvits number the system is stable at:
![]() >0,
(4)
>0,
(4)
For standard adjustments of a single-circuit speed control system having
a P-controller condition (4) is impracticable. Increasing the stability region
can be obtained by reducing the speed gain
(KSC≈0).
The stability condition for an open single-circuit system of the speed
control can be obtained by solving the following inequality:
![]() >0 (5)
>0 (5)
where К3=![]() ;К4=
;К4=![]() .
.
The system is stable at: К4-1
<0, i.e. 0 < ![]() < 1.
< 1.
In the case of the excess of the voltage drop in the mains over the
armature e.m.f. the open system
is unstable.
List
of Publications Used
1. Breydo I.V., Makarenko N.V. Problem of D.C. Thyristor
Electric Drive Stability at Power Supply
from Comparable Power Source. Modern Power Engineering, Telecommunication and
Higher Education: Publications of the 4th International Scientific-Technical Conference (September, 23-24, 2004). Almaty, 2004. s.287-290.