Технические науки/
Электротехнические комплексы и системы
Гагаринов И.В.
ФГУП Крыловский
государственный научный центр, Россия
д.т.н.
Самосейко В.Ф., к.т.н. Саушев А.В., к.т.н. Тырва В.О., Шарашкин С.В.
Государственный
университет морского и речного флота
имени адмирала С. О.
Макарова, Россия
К вопросу определения номинальной
частоты питающего
напряжения для гребных электродвигателей
Уровень искажений питающего электродвигатель
напряжения обычно оценивается коэффициентом гармонических искажений THD (Total Harmonic Distortion), который рассчитывается по формуле
![]() ,
,
где
I1, I2, …, In – амплитуды 1, 2, n– ой гармонических
составляющих тока.
На рис. 1 представлена зависимость коэффициента
гармонических искажений THD
в функции
частоты широтно-импульсного модулятора (ШИМ) для модулируемой частоты
напряжения 50 Гц на выходе преобразователя.
Рис. 1 Расчетная зависимость THD тока в функции частоты ШИМ
для модулируемой частоты 50 Гц
Из рис. 1 следует, что уровень искажений является
нелинейной функцией частоты коммутаций, причем значение частоты fшим = 1000 Гц является
определяющей, характерной точкой этой зависимости. Частота коммутации 1000 Гц и
выше возможна для IGBT-транзисторов,
но лишь для ограниченных значений тока, так как с ростом частоты увеличиваются
потери и возможен перегрев силовых приборов.
Мощность гребных электродвигателей систем
электродвижения судов обычно составляет от 0,5 МВт (гидрографическое судно) до
20 МВт (атомный ледокол). Для таких мощностей характерны большие токи, и
частота коммутаций 1000 Гц и выше является труднодостижимой. На практике для IGBT-транзисторов при уровне
мощности свыше 4 МВт частота составляет не более 600 Гц, а при меньших
мощностях – не более 400 Гц. Такие частоты коммутации приводят к заметным
искажениям напряжения (до 10% и выше от номинала), что, в свою очередь, приводит
к пульсациям момента, ухудшению энергетических характеристик и повышению
уровней шума и вибраций.
Расчетные графики форм кривых тока на выходе
преобразователя для частоты ШИМ от 250 до 5000 Гц приведены на рис. 2.
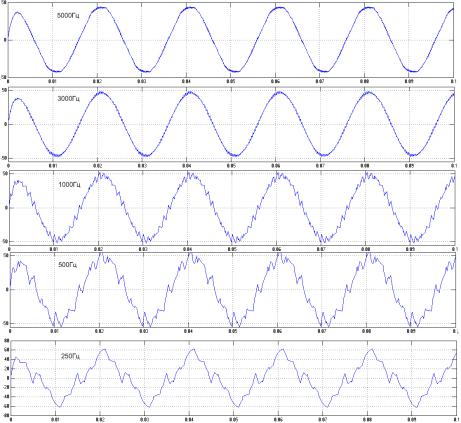
Рис. 2. Расчетные графики форм токов на RL– нагрузке
при различной частоте ШИМ
Как видно из рис. 2, при частотах 250 Гц и 500
Гц имеют место значительные искажения тока – 30 % и 16 % соответственно. Снизить
уровень искажений можно, поддерживая достаточно высокое отношение fшим/fsin частоты
ШИМ к частоте напряжения на выходе преобразователя. Чем выше этот показатель,
тем меньше уровень искажений.
На судах с системами электродвижения при прямой
передаче с гребного электродвигателя на винт отсутствуют редукторы или иные
виды понижающих механических передач. Вследствие этого, при прямой передаче на
винт номинальная частота вращения гребных электродвигателей находится в
диапазоне от 100 до 350 об/мин, уровень их мощности составляет от 0,5 до 20 МВт.
Гребные электродвигатели являются высокомощными, низкооборотными изделиями
индивидуального производства, получающими питание от преобразователей частоты.
При их проектировании и изготовлении может задаваться номинальная частота,
отличная от общепромышленной частоты, равной 50 Гц.
Отношение частоты ШИМ к частоте модулируемого
напряжения fшим/fsin (и уровень искажений) при fшим = 600 Гц и менее поддерживается уменьшением
номинальной частоты питающего напряжения. В общем случае синхронная частота
вращения ![]() электродвигателя
определяется известным выражением
электродвигателя
определяется известным выражением ![]() = 60 fном / 2p, где fном – номинальная частота питающего
напряжения; 2p – число пар полюсов. Поэтому,
при снижении частоты питающего напряжения для выполнения условия
= 60 fном / 2p, где fном – номинальная частота питающего
напряжения; 2p – число пар полюсов. Поэтому,
при снижении частоты питающего напряжения для выполнения условия ![]() необходимо уменьшать
число пар полюсов.
необходимо уменьшать
число пар полюсов.
Снижение частоты питающего напряжения оказывает
благоприятное влияние на массогабаритные размеры машины, так как уменьшает
число пар полюсов. Вместе с тем, снижение частоты приводит к снижению реактивного
индуктивного сопротивления ωL,
что оказывает влияние на энергетические характеристики и конструкцию
электродвигателя.
Таким образом, при определении номинальной частоты
питающего электродвигатель напряжения, следует искать компромисс между
следующими факторами: коммутационными возможностями полупроводниковых ключей; уровнем
гармонических искажений; числом пар полюсов; массогабаритными показателями; индуктивным
сопротивлением ωL
и его влиянием на энергетические характеристики и конструкцию машины.