H. Hussein, A. Yakunin
Minia University,
Minia, Egypt; Altai state technical
university,Barnaul, Russia
SIMPLE
CURVE SMOOTHING METHODS FOR WEATHER MONITORING SYSTEM
Curve fitting and smoothing methods have been
used for converting scattered data to modeled mathematical function [1-11].
Smoothing data is creating an approximating function that attempts to capture
important patterns in the data, while excluding noise or other fluctuations.
Technically, data smoothing is a type of low
pass filtering, which means that it blocks out the high frequency components
(short fluctuations) in order to focus
on the low frequency ones (longer trends).
In our weather monitoring systems [12], there
are many sensors that measure weather parameters. The measured data are stored
in the server database and can be displayed on the project website (http://abc.altstu.ru/).
From
the plotted curves, was observed that the curves suffered from fluctuations,
especially in the long term.
In this paper, two curve smoothing approach
will be proposed and applied to the measured values to facilitate the system
observation.
Proposed methods. To test the
measured data, a sample for one month (August 2013) has been selected and
plotted using Matlab as shown in figure 1. As shown in the figure 1 the data
were scattered widely. To get a smoothed curve, the regular curve fitting
approaches were applied using Matlab. Figure 2 shows the linear curve fitting
and 6th order polynomial fitting for the measured data.
251658240 251658240
251658240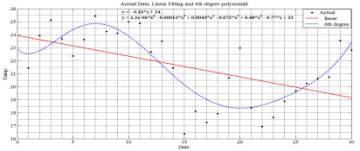
|
Fig.1. Actual measured data
in one month (August 2013) |
Fig.2. Actual data, linear
fitting and 6th |
From calculations, R2 (coefficient of determination) [5, 7] for each method
equals 0.25 and 0.67 respectively, which indicated that the regular fitting
methods suffered from accuracy issue.
So that, two alternative methods will be
presented to overcome the accuracy issue and get a fairly smoothed curves.
First method” Levels
Averages”. This method depends on dividing the measured data into levels (L) and every value of measured data
within a level will be replaced with the average value of that level. The
following equation summarizes that process:
" y(ti) ϵ Lx : f(ti) = mean (Lx).
Where: y(ti)
is the measured value at the time ti,
f(ti) is the modified value and Lx the level, at which the measured value is located.
This method has been applied for measured data
in one month (August 2013). The result has been plotted using Matlab as shown
in figure 3.
The R2
for the proposed method equals 0.89, which is better than the regular curve
fitting method. But the results of the proposed method still suffer from fluctuations.
Second method” Time interval
segmentation”. This method depends
on dividing the time period of the measured data into small segments (s1,
s2, ………, sn). The actual measured data will be replaced
with their average values within each segment. The following steps summarize
the method algorithm.
- Eliminating fluctuations: By normalizing
points that make the curve fitting accuracy decreased. The equation summarizes
the normalizing process:
![]()
Where y(t)
is the actual measured data and ![]() is the mean value of y(t).
is the mean value of y(t).
- Time interval segmentation: For simplicity,
the time axis will be divided into symmetrical time slots (s1,s2,………,sn). The average for
all values in every time slot will be calculated according to the following
equations:
ӯ(ẗ)
= mean (fi(t) : fi+s(t))
where: ẗ - mean( ti : ti+s); i =
1,s,2s,………..,N-s; N - the length of
f(t); s - the time slot width.
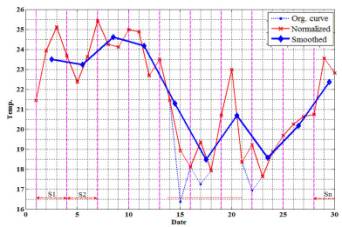
The result has been plotted using MATLAB and
the output is shown in figure 4.
251658240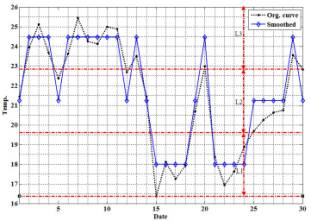
|
Fig.3. first proposed
methods (Level average) output curve
(August 2013) |
Fig.4. Actual data,
Normalized |
The R2
for the second method equals 0.8. The accuracy of that method is directly
proportional with the time slots width (s).
From the previous results, it seems that the
second proposed method is better, because the output curve is smoother than the
other method. Also the coefficients of determination R2 in both methods were almost the same.
So, the second method has been applied for the
measured data in a short term (one day) and in a long term (one year) the
results are shown in figures 5 and 6.
The output curves indicate that the interval
segmentation method is useful for curve smoothing without losing the accuracy
especially for short period measurements.
251658240 251658240
251658240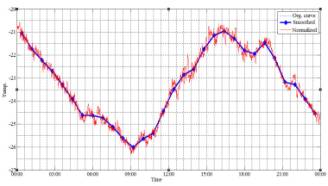
|
Fig.5. Actual data,
Normalized and Smoothed curves at 30/1/2014 |
Fig.6: Actual data,
Normalized and Smoothed curves in 2013 |
Conclusion. Two curve smoothing methods were presented for weather
monitoring system. The first depends on dividing the measured values into
levels. All measured values within a level were replaced with the mean value of
that level.
A
better method depends on dividing the time period into slots. All actual values
were replaced with the average within the corresponding slot.
The output curves, plotted using
Matlab, indicated the effectiveness and efficiency of the proposed methods.
References
1. S. L. Arlinghaus, “Practical Handbook of Curve Fitting,” CRC Press,
1994.
2. J. Hoschek, “Smoothing of curves
and surfaces,” Elsevier Science
Publishers B.V. (North-Holland), Computer Aided
Geometric Design 2 ,1985,pp. 97-105.
3. K. Lawonn et al., “Adaptive and robust curve smoothing on surface
meshes,” Elsevier Computers & Graphics,Vol.40, May 2014, Pp.22–35.
4. Y. Wang et al.,” Adaptive variational curve smoothing based on level set
method,” Elsevier Journal of Computational Physics 228 ,2009,pp. 6333–6348.
5. J. Bird, “Engineering Mathematics,” Elsevier Ltd, Fifth edition,2007.
6. R. Weitkunat, “ Digital Biosignal Processing,” Elsevier Science
Publishers B. V,1991.
7. R. Steel and J. Torrie, “Principles and Procedures of Statistics with
Special Reference to the Biological Sciences,” McGraw Hill, 1960.
8. K. Maccallum and J. Zhang, “Curve-smoothing Techniques Using B-splines,”
Oxford Journals Mathematics & Physical Sciences Computer Journal Vol. 29,
No. 6, Pp. 564-571. 1986.
9. D. Lowe, "Organization of smooth image curves at multiple
scales,"Int. J. Computer Vision, vol. 3, no. 2, pp. 119-130, June 1989.
10. G. Taubin. “Curve and surface smoothing without shrinkage,” Fifth
International Conference on Computer Vision, pp. 852 – 857, June 1995.
11. J. Simonoff , “Smoothing Methods in Statistics,” Springer; Corrected
edition , 1998.
12. H.М.Hussein, R.V.Kuntz, L.I. Suchkova, A.G.Yakunin “Design and
implementation of weather and technology process monitoring systems”, Известия
Алтайского государственного университета, 2013, No. 1 ,C. 210-214.