К.т.н. Игнатьев В.В.1,
к.т.н. Коберси И.С.1, к.т.н. Спиридонов О.Б.1, Ополькин
А.П.2
1Южный федеральный университет, НКБ МИУС, Россия,
2Донской государственный технический университет, Россия
Интеллектуальные системы управления
в области проектирования подъемных сооружений
Сегодня любое промышленное предприятие, вне
зависимости от сферы деятельности, очень трудно представить без современных
систем управления, благодаря которым, достигаются максимально эффективные
показатели работы. Также очевидно, что одну из ключевых ролей в эффективной
работе на том или ином производстве играют подъемные сооружения. В частности,
эффективная работа грузоподъемных кранов способствует значительному увеличению
общей производительности предприятия, а также регулированию затрат [1].
Тем не менее, в России не так много предприятий,
прошедших процедуру «перевооружения», и в основном на таких предприятиях
работают старые подъемные сооружения с истекшим сроком службы, которые
нуждаются в замене или капитальном ремонте, так как затраты на их содержание
высоки.
В связи с вышесказанным актуальным является
разработка и внедрение таких систем управления, которые позволили бы сократить
расходы, улучшить производительность работы, увеличить количество перемещаемого
груза за смену, повысить точность и безопасность работы подъемных сооружений.
При проектировании таких систем управления
необходимо использовать не только проверенные в эксплуатации и хорошо
зарекомендовавшие себя технические решения, но и современные научные подходы и
методы которые явились результатом работы ведущих ученых из разных стран мира.
Для удобства использования подъемных сооружений
и его экономичности разрабатывают и постоянно совершенствуют такие системы
управления как [2]:
- система контроля раскачивания груза.
Данная система существенно экономит время, облегчает работу и делает ее более
безопасной;
- система позиционирования груза в заданной
точке. Благодаря такой системе сокращается рабочий цикл и обеспечивается
точность управления;
- системы защищенных зон, которые исключают
возможность человеческой ошибки, обеспечивают безопасность персонала и расположенного
вблизи оборудования;
- система синхронизации подъема. В
частности, при наличии такой системы балансирование крюков становится
устаревшей операцией. Данная функция предлагает более простой и безопасный
метод;
- интерфейс «человек-машина» – информативная
система радиоуправления;
-энергосберегающие приводы, применение которых
сокращает расход энергии, возвращая ее в сеть;
- микроскорость обеспечивает точное
позиционирование груза в ситуациях, когда эта операция затруднена.
Для решения подобных
задач в краностроении широкое распространение получили нечёткие системы
управления. Гибридные автоматизированные системы управления с применением
нечёткой логики преимущественно используются на портовых кранах, отличающихся
повышенной сложностью исполнения, а также программного обеспечения.
Эти системы вступают в
действие, когда технологические процессы, в которых задействован грузоподъёмный
кран очень сложны или не могут быть описаны математически, поведение процессов
непредсказуемо или появляются нелинейности, но доступно экспериментальное
исследование действующего процесса [3].
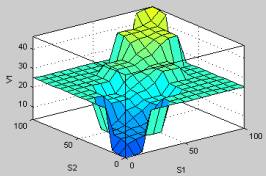
Так для решения задачи управления двумя
мостовыми кранами в момент сближения разработана нечеткая модель, [1]
позволяющая решать проблемы реализации качественного управления. Вид
поверхности нечеткого вывода разработанной нечеткой модели представлен на
рис. 1.
Изображенная поверхность вывода, может быть
интерпретирована как график функциональной зависимости выходной переменной от
входной (рис. 2).
|
Рис. 1. Вид поверхности нечеткого вывода |
Рис. 2. Тренд функциональной зависимости |
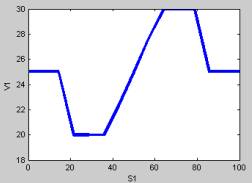
Из анализа данного графика видно, что
зависимость характеризует некоторый тренд. Установление данной зависимости
является решением задачи, известной в классической теории управления как задача
синтеза управляющих воздействий.
Литература
1. В.В. Игнатьев, И.С. Коберси.
Информационные системы управления качеством в автоматизированных и
автоматических производствах. Практикум: Учебно-методическое пособие. –
Таганрог: Изд-во ЮФУ, 2013. – 108c.
2. Автомобильная промышленность.
Грузоподъемное оборудование для вашего предприятия. http://www.konecranes.ru/sites/default/files/download/02_
_automotive_industry_solutions.pdf.
3. Леоненков А.В. Нечёткое
моделирование в среде MATLAB и fuzzyTECH. – СПб.: БХВ – Петербург, 2005. – 736с.