Karachun V.V.
National Technical
University of Ukraine “KPI”
A GYRO OF THE ДУСУ-CLASS IN CONTROL
SYSTEM OF AIRCRAFT
In
control systems of hypersonic aircraft which are controlled by launch vehicles
(LV), cruise rockets, are widely used the so-called “float gyroscopes”. These
float gyros are structurally released from the main disadvantages of "dry" devices - significant (and,
more important, variable) moments of the dry
friction force on the outgoing axis and unacceptably high sensitivity to shocks
and vibration, especially undesirable for integrating gyroscopes. The main
difference of the float modifications is a movable part of the device immersed
in heavy organofluoric (specific gravity 1,9•103 Nm -3)
or organochlorine (specific gravity 2,7·103 Nm -3)
fluid. The gyromotor was located in a sealed cylindrical float, filled with
helium or hydrogen. By means of longitudinal pins the cylindrical float is
installed in the outer, also sealed, coaxial circular cylinder, which serves as
the body of the device. The supports of moving parts in some cases are carried out on the rocks.
Such technical
solutions are typical for a number of designs. Floating devices, unlike float,
have no excessive weight.
The
clearance between the lateral surface of the float and its body is too small
and is about 0,2 mm in the radial
direction. High viscosity of the fluid and a small size of the working
clearance allow providing a required damping factor in the integrating
gyroscope.
All
following conclusions will be made focusing on specific technical realization
of commercial manufacture by the aviation industry this float device. For
example, we will take into consideration the gyro angle rate sensor ДУСУ-30В,
and which is designed for use in aircraft of a long-lasted operation.
As to
the principle of operation the device is inertial, that it does not require a
contact with the environment. Dynamic properties of the sensor are described by
an oscillatory link. Technical performance of the ДУСУ device
is a poly-unit structure. The ДУСУ purpose is to
measure the angle rate of hypersonic aircraft. The configuration of the device
is shown in Fig. 1. The measuring range of angle rate is of ![]() 30 deg s-1. The
sensor threshold of ДУСУ-30В is about 0,45
deg s-1.
30 deg s-1. The
sensor threshold of ДУСУ-30В is about 0,45
deg s-1.
Brief technical characteristics of standardized
gyroscopic sensor for angle rate
 a) The sensor
normally works fine from power sources: 3-phase
AC voltage of 36 V frequency of 400 Hz (for the gyromotor) and direct current voltage 5 ÷ 30 V (for potentiometer).
a) The sensor
normally works fine from power sources: 3-phase
AC voltage of 36 V frequency of 400 Hz (for the gyromotor) and direct current voltage 5 ÷ 30 V (for potentiometer).
It is
possible to supply the potentiometer with AC voltage 5 ÷ 30 V (rms
value) at up to 2000 Hz.
b) The
sensor’s readiness to work is no more than 50
seconds. At the 10-second forced
supply 54±3 B (for the sensors with supply of gyromotors 36 B 1000 Hz) time of
readiness does not exceed 20 seconds.
c)
Alternating current consumption per phase is less than 0,3 A.
d) The
sensor threshold is no more than 0,45 deg
s -1.
e) The
angle rate range is ± 30 deg s -1.
e) The
dependence of the output signal on the angle rate at the potentiometer supply
with voltage 27 V is in the product certificate.
When
the potentiometer is supplied with other, not 27 V, voltage within 5
÷ 30 V the output signal is recalculated by the formula –
where ![]() – potentiometer
with voltage 27 V;
– potentiometer
with voltage 27 V; ![]() - voltage, not 27
V within 5 ÷ 30 V;
- voltage, not 27
V within 5 ÷ 30 V; ![]() – the output
signal when the supply of the potentiometer is of voltage 27 V.
– the output
signal when the supply of the potentiometer is of voltage 27 V.
i) The
sensor operates in the temperature range from + -60ºC to 60ºC.
c) The
sensor is vibrationproof in the frequency range from 5 Hz to 2000 Hz with
overload up to 30 g.
i) The
sensor is resistant to overloads up to 35
g.
k)
Frequency of own undamped oscillation is within 14 - 21 Hz.
l) The
resistance of the potentiometer is 800
ohms ± 20%.
m) The
ratio of amplitudes in half of the period in the temperature range is up to + -60ºC 60ºC equal to 0,05 ÷ 0,5.
n) The
permissible current in a circle of loads of the potentiometer does not exceed 0,03 A.
o) The
weight of the sensor is not more than 4,2
N.
The
electrical circuit of the sensor of the ДУСУ- class
![]()
![]()
![]()
![]()
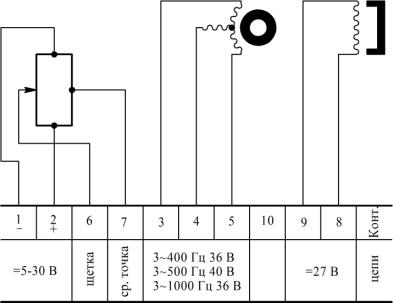
When
connected to the torque sensor (contacts 9 and 8) DC = 27 V, polarity
"-" on contact 9 and "+" on contact 8 is equivalent to the
effect of the sensor in the direction "clockwise"
on the angle rate.