Технические науки/ 6. Электротехника и
радиоэлектроника
Стоцкая
А.Д., Калинин А.В., Пекаровский А.С., Шелудько В.Н.
ГОУ ВПО
Санкт-Петербургский государственный электротехнический университет, Россия
Исследование
динамики ротора вращающегося в упругих опорах
Применение упругих опор – активных магнитных
подшипников – в качестве подшипниковых узлов электрических машин в настоящее
время является перспективным направлением в высокоскоростном машиностроении [1].
Рост скоростей вращения, требуемых для
выполнения задач и технологических процессов промышленности, приводит к
необходимости использования активных магнитных подшипников для стабилизации положения
ротора электрической машины. Однако синтез системы управления активными
магнитными подшипниками является сложной задачей вследствие наличия
нелинейностей, присущих как самому ротору, так и магнитной системе подшипников.
Одной из задач при построении системы управления
является исследование динамики объекта управления в определенном диапазоне
скоростей вращения. В качестве объекта рассматривается ротор электрической
машины, обладающий пятью степенями свободы.
Математическая модель ротора в упругих опорах
имеет вид:
![]() ,
,
где
![]() – инерционная матрица,
– инерционная матрица, ![]() – матрица диссипативных и гироскопических сил,
– матрица диссипативных и гироскопических сил, ![]() – матрица жесткости,
– матрица жесткости,![]() – обобщенный вектор координат (рассматриваются координаты по
осям X и Y, перемещения ротора относительно оси Z считаются пренебрежимо
малыми),
– обобщенный вектор координат (рассматриваются координаты по
осям X и Y, перемещения ротора относительно оси Z считаются пренебрежимо
малыми), ![]() – вектор магнитных сил упругих опор (активных магнитных
подшипников),
– вектор магнитных сил упругих опор (активных магнитных
подшипников), ![]() – гравитационная сила,
– гравитационная сила, ![]() – обобщенная возмущающая сила [2]. Таким образом, исследуемый
объект рассматривается как четырехканальная система.
– обобщенная возмущающая сила [2]. Таким образом, исследуемый
объект рассматривается как четырехканальная система.
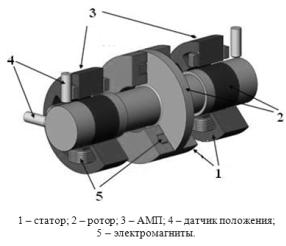 Схематичное представление ротора в активных магнитных
подшипниках имеет вид, приведенный на рис. 1.
Схематичное представление ротора в активных магнитных
подшипниках имеет вид, приведенный на рис. 1.
Исследование объекта управления заключается в
изучении свойств ротора при изменении скорости вращения. Рассматриваются
различные характеристики объекта управления и дается оценка полученным
изменениям.
Рис. 1 – Ротор в АМП
Влияние скорости вращения ротора на передаточные
функции объекта.
Для проведения исследования необходимо провести предварительную линеаризацию
модели с целью получения передаточных функций каждого из четырех независимых
каналов управления и рассмотреть динамику в рабочей точке.
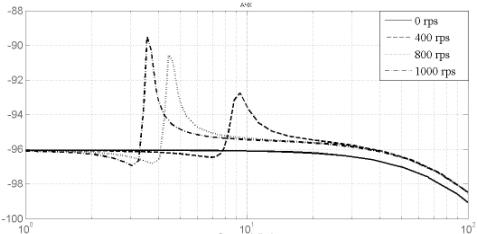
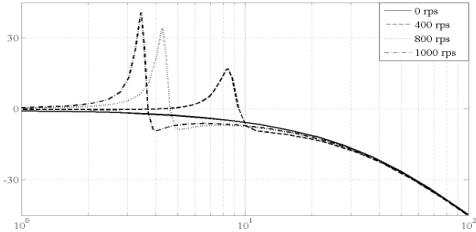
Из анализа передаточных функций (ПФ) каналов следует,
что с увеличением скорости вращения ротора изменяется их характер: если на
малых скоростях вращения ПФ одного канала является комбинацией форсирующего
звена 1-го порядка, апериодического звена 1-го порядка и колебательного звена
![]()
то
на высоких скоростях (до 1000 рад/с) ПФ объекта является комбинацией
форсирующего звена 1-го порядка, форсирующего звена 2-го порядка,
апериодического звена 1-го порядка и
двух колебательных звеньев:
 .
.
Переходные процессы, представленные на рис. 2,
иллюстрируют влияние тех или иных звеньев на характер реакции системы. Как
видно из рисунка с ростом частоты вращения, переходные процессы приобретают колебательный
характер.
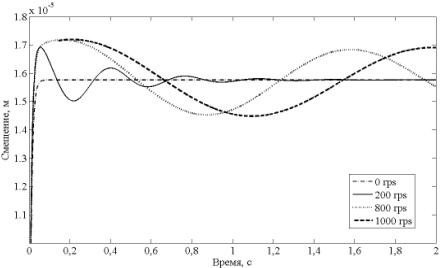
Рис. 2 – переходные процессы смещения ротора
Влияние скорости вращения ротора на расположение
полюсов и нулей. Система строго
собственная (реализуемая) – степень полинома числителя строго меньше степени
полинома знаменателя [3]. При скорости вращения ротора равной нулю, полюсы и
нули передаточной функции объекта управления лежат на вещественной оси, а с
ростом скорости вращения ротора становятся комплекснозначными и сдвигаются к
мнимой оси, что свидетельствует о том, что система стремится к колебательной границе
устойчивости.
По расположению полюсов можно сделать следующие
выводы о корневых показателях качества системы:
1. Показатель устойчивости
η(ω) с ростом скорости вращения ротора уменьшается;
2. Показатель
колебательности μ(ω) с ростом скорости вращения ротора увеличивается.
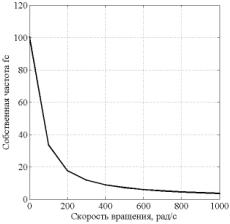
При этом необходимо отметить, что при увеличении
скорости вращения, собственная частота затухающих колебаний экспоненциально уменьшается.
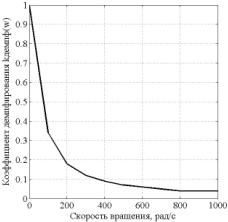
Значения собственных частот fс(ω)
и коэффициента демпфирования kдемпф(ω)
в зависимости от скорости ω представлены
на рис. 3 и рис. 4 соответственно.