Современные
информационные технологии 2. Вычислительная техника и программирование
К.т.
н. Патракеєв І.М.
Харківський національний університет міського
господарства
імені О.М. Бекетова, Україна.
Планування
територіального розвитку з використанням ГІС та інтегрованого штучного
інтелекту
Планування територіального розвитку великого міста це
є особливий вид практичної діяльності -
планової роботи, що складається в розробці стратегічних рішень (у формі
прогнозів, проектів, програм та планів), що передбачають висування таких цілей
і стратегій поведінки, реалізація яких забезпечує ефективне функціонування
міста в довгостроковій перспективі.
В
результаті прийняття і здійснення помилкових рішень порушуються принципи
сталого розвитку, з'являються небезпеки, що загрожують життєздатності міста. У
зв'язку з цим для формування науково обгрунтованого підходу до прийняття управлінського
рішення щодо реалізації планів розвитку міських територій необхідно знайти
технології, що дозволяють формувати та аналізувати різні альтернативні варіанти
і оцінювати їх ефективність.
Місто
є динамічно розвивається складною системою, що включає природні,
архітектурно-планувальні та соціальні підсистеми. Інформація, що описує
функціонування цих підсистем, як правило, велика за обсягом, неоднорідна і
найчастіше не має кількісної інтерпретації.
Побудова
моделей таких систем, відображення переходу елементів і системи в цілому з
одного стану в інші представляє значну трудність. Традиційні методи, в силу
своєї аксіоматики, не пристосовані до рішенням подібного роду завдань.
Виключення з розгляду якісної інформації, джерелом якої, найчастіше, є багатий
досвід і інтуїції кваліфікованих фахівців, значною мірою впливає на
адекватність моделі, істотно спрощуючи її, що веде до зниження достовірності
одержуваних результатів [ 2 ]. У зв'язку з цим для обробки даних і формування
сценаріїв територіального розвитку великих
міст доцільно використовувати моделі які засновано на
інтеграції геоінформаційних систем,
однорідних структур та штучних нейронних мереж [ 3, 4 ].
У останні десятиліття однорідні структури (ОС; основний
синонім - клітинні автомати; у англомовній термінології відповідно - Homogeneous Structures і Cellular Automata) стали потужним
засобом для моделювання складних систем. Однорідні структури є формалізацією
поняття нескінченних регулярних чарунок (мереж) з ідентичними кінцевими
автоматами, які інформаційно пов'язані один з одним однаковим чином в тому
сенсі, що кожна чарунка може безпосередньо отримувати інформацію від цілком
визначеної для неї кінцевої безлічі сусідніх чарунок (автоматів). При цьому,
сусідство розуміється не в геометричному, а в інформаційному плані. Сусідство
одиничних автоматів встановлюється постійним для кожної чарунки і визначається
спеціальним вектором - індексом сусідства.
Однією з основних і найбільш важливих особливостей ОС-моделей є
той факт, що моделі, побудовані на основі однорідних структур, можуть
моделювати складну просторову динаміку розвитку території. Більш того,
використання ОС-моделей дозволяють моделювати динамічні процеси у просторі та
часі які пов’язані з розвитком території.
У тезах розглянута ОС-модель території з використанням
багатошарової нейронної мережі (БНМ) щодо прогнозування потенційних або
альтернативних сценаріїв залежно від значень початкових чинників, які впливають
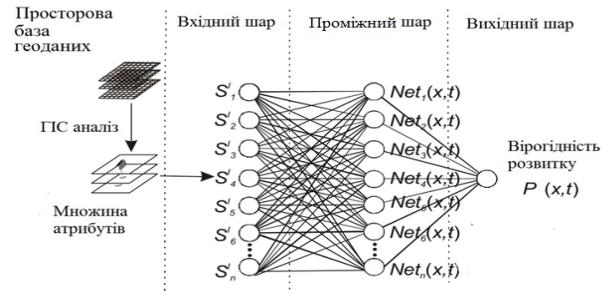
на процес стійкого розвитку території. Структура моделей територіального розвитку
заснованих на використанні ОС-структур та штучних нейронних мереж показано на
рисунку 1.
На кожному кроці БНМ визначає вірогідність розвитку для кожного
одиничного клітинного автомата (ОКА), поточний стан якого визначається значеннями множини вхідних атрибутів. Стан кожного ОКА визначається множиною атрибутів:
(S1, S2, S3, S4, S5, S6, …., Sn).

Всі початкові данні зазвичай нормалізуються на інтервалі [0, 1] до використання їх у БНМ. У ОС-моделі використовується проста тришарова нейрона
мережа (рис.2). В
нейронній мережі сигнал, який отримує нейрон j проміжного шару від вхідного шару щодо клітини x обчислюється як:
![]() (1)
(1)
де хi,j
– одиничний клітинний автомат;
netj (x,t) – сигнал, якій
отримує нейрон j ОКА хi,j на момент часу t ;
Wi,j – ваговий коефіцієнт зв’язку між нейроном i та j ;
Si,j – значення фактору впливу на територіальний розвиток (значення нейрону i).
Активація проміжного шару здійснюється
з використанням сигмоїдальної логістичної передавальної функції. Математично цю
функцію можна виразити так:
![]() (2)
(2)
Те, що похідна цієї функції може бути виражена через її значення
полегшує використання цієї функції при навчанні мережі за алгоритмом зворотного
поширення [2].
Вірогідність розвитку (P) кожного ОКА хi,j на момент часу t обчислюється як:
![]() (3)
(3)
Вірогідність розвитку обчислюється
відповідно до множини атрибутів, значення яких використовуються як вхідні данні
на кожній ітерації. Вірогідність розвитку дозволяє прийняти рішення щодо зміну стану кожного ОКА хi,j ОС-моделі.
В наших умовах розглядається перехід стану кожного ОКА з незабудованого в
забудований. На рисунку 2 показана спрощена
структурна схема багатошарової штучної нейронної мережі.

Для прогнозування можливого
сценарію розвитку території ОС-модель була використана для моделювання зміну
стану земельних ділянок від незабудованих до забудованих. При моделюванні біло задіяно сім параметрів, які характеризують кожний ОКА хi,j ОС-моделі:
S1 –
відстань до головних магістралей;
S2 –
відстань до найближчих шляхів;
S3 – відстань до річок;
S4 – відстань до міських зон;
S5 – відстань до залізниці;
S6 – значення фокальної
функції для 7×7 чарунок відносно кожного ОКА хi,j;
S7 – кількість чарунок які
відповідають земельним ділянкам сільхозпризначення.
Основною перевагою вибору таких
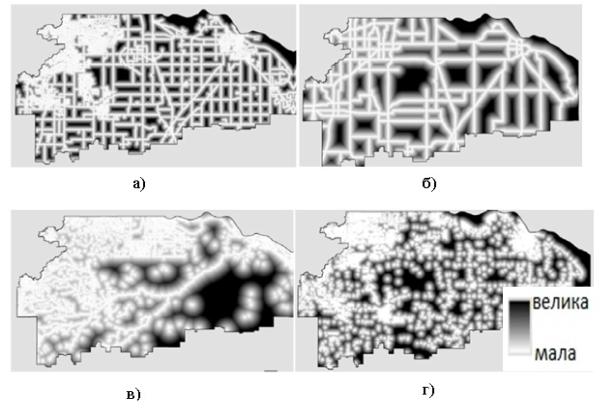
чинників є той факт що такі фактори впливають на вірогідність розвитку території [3]. Значення цих факторів були отримані з застосуванням ГІС-аналізу. Параметри
відстаней були обчислені з застосуванням базової функції ArcGIS 9.3 – Евклідова
відстань ( Eucdistance). Ці відстані динамічно оновлюються для кожного ОКА хi,j під час моделювання.
Для визначення клітинних автоматів-сусідів
обрано 7×7 чарунок відносно кожного ОКА хi,j ОС-моделі. Значення кожного ОКА
хi,j обчислюється з застосуванням базової функції ArcGIS 9.3 – Фокальна функція ( Focal function).
Ці значення також динамічно оновлюються для кожного ОКА хi,j під час моделювання. На рисунку 3 надано приклади параметрів які
використовуються в ОС-моделі.
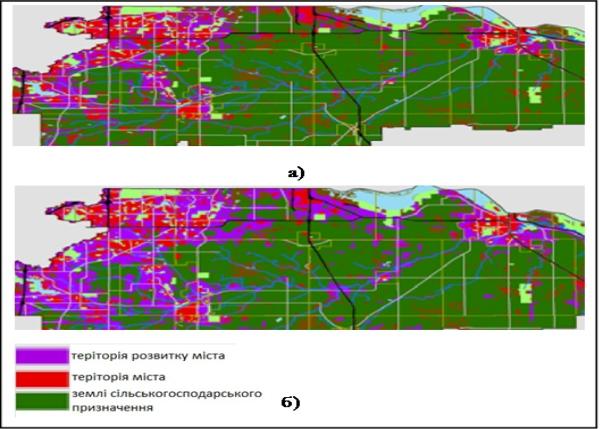
На рисунку 4 представлено результати
моделювання. Показано можливість зростання забудови території на 2020 рік.
В якості висновків треба відмітити, що
багатошарові нейронні мережі можуть ефективно інтегруватися з однорідними
структурами для моделювання динаміки зміни землекористування що в свою чергу
впливає на динаміку розвитку території та результати моделювання можуть
використовуватися при прийнятті рішень з планування територіального розвитку.


Перелік
використаних джерел
1.Ф. Уоссермен. Нейрокомпьютерная техника:
теория и практика. М. Мир - 1992.
2. Вороновский
Г.К., Махотило К.В., Петрашев С.Н., Сергеев С.А. Генетические
алгоритмы, искусственные нейронные сети и проблемы виртуальной реальности.
Харьков: Основа - 1997, 112с.
3. Batty, M., Xie, Y.. Urban Analysis in a GIS Environment: Population Density Modeling Using ARC/INFO. A. S. Fotheringham and P. A. Rogerson (editors) Spatial Analysis and GIS, Taylor and Francis
London, 1994: 189-219
4.
Bonfatti, F., Gadda, G., Monari, P. D. Cellular Automata For Modelling Lagoon
Dynamics. Pro- ceeding of Fifth European Conference and Exhibition on
Geographical Information Systems, 1994
5.
C1arke, K.C., Riggan, P. Brass, J.A. A cellular Automaton Model of Wildfire Propagation and Extinction. Photogrammetric
Engineering and Remote Snesing, 1995,
60, 1355—1367
6.
Couclelis, H. From Cellular Automata to Urban Models: New Principles for Model
Development and Implementation, Environment and P1aaning B, 1997, 24: 165-174
7.
Li X., Yeh A. G. O., Neural-network-based Cellular Automata for Realistic and
Idealized Urban, 2002, Acta Geographica Sinica (in Chinese), 57(2):159-166