Технічні науки/ Автоматизовані
системи управління на виробництві
Лисиця М.П., Лисиця П.М.
Полтавський національний технічний університет ім.
Ю. Кондратюка
CИНТЕЗ СИСТЕМИ
МОДАЛЬНОГО АСТАТИЧНОГО КЕРУВАННЯ ОБ’ЄКТАМИ З ЗАПІЗНЮВАННЯМ
У багатьох
технологічних процесах, таких як холодний прокат металу, процес горіння в топці
мазутної печі [1], регулювання рівня рідини в баках, перекачування газу в
трубопроводах і об’ємних резервуарах, керування процесом формування скляних
виробів, виникає запізнювання, наявність
якого погіршує динаміку роботи систем зі зворотними зв’язками, а іноді призводить
до їх непрацездатності. Існуючі методи керування вказаними об’єктами з
запізнюванням, такі як метод компенсації Р. Бесса для оптимальних систем, метод
прогнозування координат регульованої величини та її похідних, метод з
упереджувачем Смітта, метод модального керування на основі упереджуючого вектора стану зі спостерігачем повного
порядку і моделі об’єкта керування [2], мають певні суттєві недоліки, через
що виникає необхідність пошуку інших більш ефективних шляхів такого керування.
Для синтезу такої ефективної системи модель об’єкта розбито на дві
незалежні частини – активну та пасивну. Побудову дискретної моделі об’єкта 4-го порядку виконано на прикладі
тестового об’єкта з активною частиною другого порядку (n =
2), з відносним порядком один та пасивною частиною з двома елементами затримки
(d = 2).
Дослідження
виконано для об’єкта керування з параметрами: ![]() ,
, ![]() ,
, ![]() ,
, ![]() , затримкою - два такти дискретизації, періодом
дискретизації Т = 0,1 с.
, затримкою - два такти дискретизації, періодом
дискретизації Т = 0,1 с.
Виходячи з бажаної траєкторії руху
системи ![]() , замкнутої через астатичний регулятор K, на основі рівняння
, замкнутої через астатичний регулятор K, на основі рівняння ![]() за формулою Аккермана
знайдено матрицю коефіцієнтів зворотного зв’язку K при повному та неповному астатичному керуванні
об’єктом 4-го порядку. Використовуючи принцип дуальності між повною керованістю
і спостережуваністю [2, 3], знайдено матрицю підсилення L спостерігача стану повного
порядку за умови забезпечення необхідної швидкодії процесу встановлення
оцінюваних координат стану
за формулою Аккермана
знайдено матрицю коефіцієнтів зворотного зв’язку K при повному та неповному астатичному керуванні
об’єктом 4-го порядку. Використовуючи принцип дуальності між повною керованістю
і спостережуваністю [2, 3], знайдено матрицю підсилення L спостерігача стану повного
порядку за умови забезпечення необхідної швидкодії процесу встановлення
оцінюваних координат стану ![]() .
.
Синтезована структурна
схема системи модального дискретного керування об’єктом із запізнюванням на
основі астатичного спостерігача стану для астатичного керування за двома
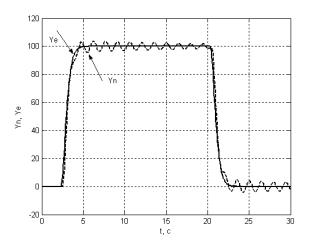
координатами наведена на рис. 1. При дослідженні системи збурюючий вплив
навантаження задано стопроцентним значенням зміни вихідного сигналу об’єкта при
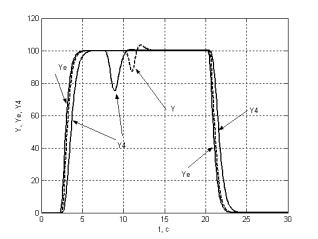
розімкненому основному контурі керування і зведено до входу об’єкта. На рис. 2
– рис. 4 наведено порівняльні діаграми роботи систем керування: Y – синтезованої
за двома координатами; Y4 – синтезованої за чотирма координатами; Ye – бажаної, взятої за еталонну, заданої для
характеристичного рівняння 3-го порядку; Yn – існуючої системи, синтезованої за [2].
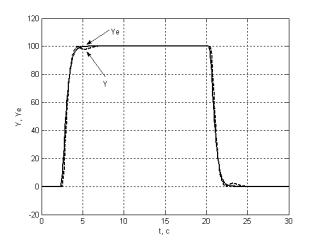
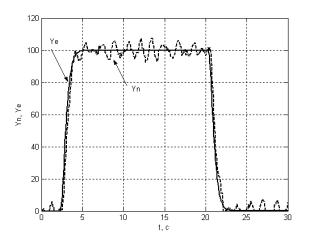
Оцінка впливу збурення білого шуму
в каналі вимірювання зі значенням 3s =3 % від максимального значення вихідного
сигналу наведена на діаграмах рис. 4.
Дослідження синтезованої системи
підтвердило більш якісне функціонування її по відношенню до існуючої при стопроцентному
збурюючому впливі навантаження та наближених значеннях параметрів моделі
об’єкта, а також при наявності шумового впливу в каналі вимірювання.
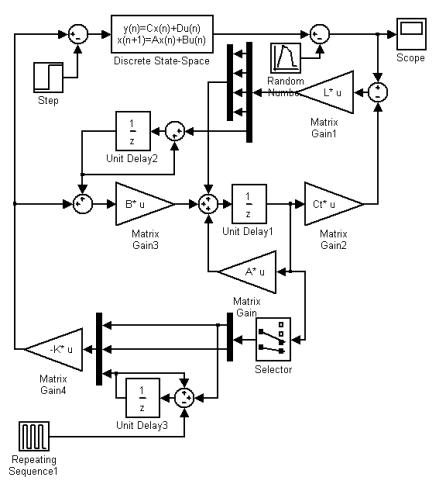
Рис.
1. Структурна схема системи астатичного дискретного керування об’єктом із
запізнюванням на основі астатичного спостерігача стану
a) б)
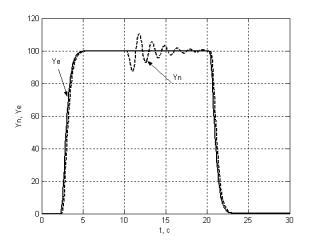
Рис.
2. Вихідні сигнали об’єкта при збуреннях: а) Y, Y4;
б) Yn
a) б)
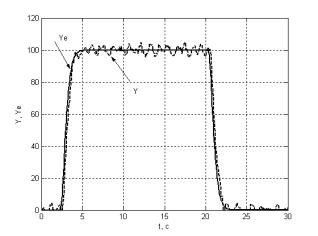
Рис.
3. Вихідні сигнали при наближених
параметрах об’єкта: а) Y; б) Yn
a) б)
Рис.
4. Вихідні сигнали при шумах у каналі
вимірювань: а) Y; б) Yn
Література:
1. Клюев, А.С.
Синтез быстродействующих регуляторов для объектов с запаздыванием / А.С. Клюев,
В.С. Карпов. - М.: Энергоатомиздат, 1990. - 176с.
2. Нгуен, Ф. В. Цифровые
регуляторы для объектов с запаздыванием на основе наблюдателя полного порядка
[Электронный ресурс]: дис. … канд. техн. наук: спец. 05.13.01 / Фам Вам Нгуен.
– Тула: РГБ, 2007. – 125 с.
3. Изерман, Р.
Цифровые системы управления: пер. с англ.
/ Р. Изерман. - М.: Мир, 1984. - 541 с.