Технические науки/12.Автоматизированные системы
управления на производстве.
Магистрант
Бабич А.С., старший преподаватель Штифзон О.И.
Национальный
технический университет Украины «Киевский политехнический институт», Украина
Использование
алгоритмов нечеткой логики для управления объектом с параметрической
непостоянностью
Показатели качества
системы управления не всегда соответствуют значениям, определенным при её
первоначальной настройке. Связано это, в первую очередь, с тем, что параметры
объекта (постоянные времени, коэффициент усиления) могут со временем изменяться, тем самым
влияя на переходной процесс. Это происходит под влиянием различных факторов,
таких как износ оборудования, режим работы объекта и т.д.
Чтобы уменьшить
влияние параметрической непостоянности объекта управления на качество
переходного процесса, предлагается вместе с классическим ПИ-регулятором
использовать адаптер на основе нечеткой логики. Адаптер должен выдавать
значения коэффициентов Кр и Ті
для стандартного ПИ-регулятора, основываясь на входных данных, в качестве
которых предлагается использовать сигнал рассогласования и производную от
сигнала рассогласования. На рис.1 предоставлена структура предлагаемой АСР.
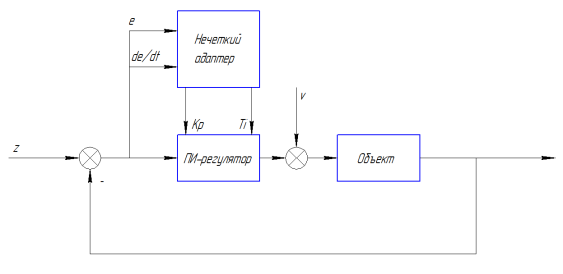
Рис.1. Структура АСР с нечетким
адаптером.
Специфика
функционирования предлагаемой системы основывается на следующих утверждениях:
- Использование нечеткого адаптера не
гарантирует, что поведение системы управления может быть предсказано с
определенной точностью;
- Правильная настройка нечеткого адаптера
невозможна без предварительного исследования работы системы управления с
ПИ-регулятором;
- Настройка нечеткого адаптера должна
производиться, исходя из исследования работы ТОУ по одному из каналов
управления;
- Работа системы управления с нечетким
адаптером может гарантировать ожидаемое качество управления только в канале, по
которому производилось предварительное исследование работы системы управления.
Качество работы системы по всем остальным каналам предвидеть невозможно.
В качестве примера, рассмотрим
АСР подачи топлива прямоточного котла с использованием сигнала «по теплоте». Здесь
присутствует параметрическая непостоянность, поскольку промежуточная зона в
прямоточном котле изменяется, в зависимости от параметров работы котла. [6]
Настройка
ПИ-регулятора для исследования работы системы проводилось с помощью метода РАФХ
[4]. Были определены граничные значения входных величин для нечеткого адаптера
при единичном входном возмущении. Исследование проводилось по каналу
«возмущение-выход». Переходной процесс в системе управления представлен на
рис.2.
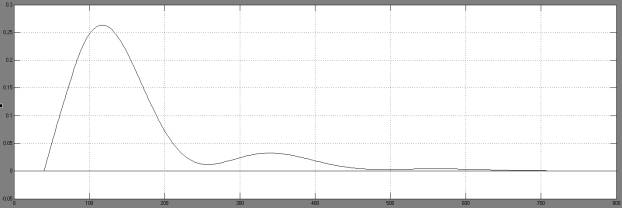
Рис.2. Переходной процесс в системе
управления с ПИ-регулятором.
При разработке базы
правил нечеткого адаптера были использованы следующие предположения [3]:
- До достижения
максимального динамического заброса сохранять значения Кр и Ті близкими к рассчитанным с помощью метода
РАФХ;
- Непосредственно
после начала уменьшения величины рассогласования и до момента, когда значение
сигнала будет близким к нулю, увеличить Кр и уменьшить Ті;
- Когда
рассогласование близко к нулю – сохранять значение Кр близким к рассчитанному и
увеличить Ті.
Таким образом,
получаем следующее разбиение входных и выходных переменных на лингвистические
переменные (ЛП) [5] (рис. 3-6).
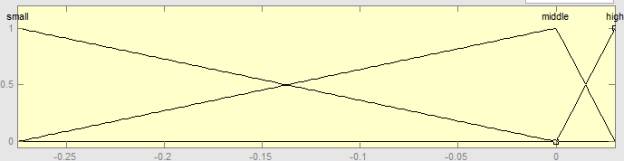
Рис.3. ЛП входа «сигнал рассогласования».
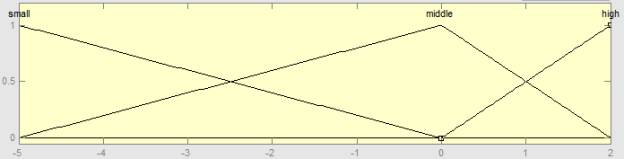
Рис.4. ЛП входа «производная сигнала
рассогласования».
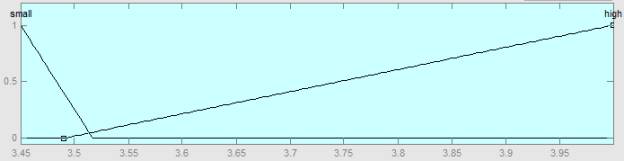
Рис.5. ЛП выхода «Кр».
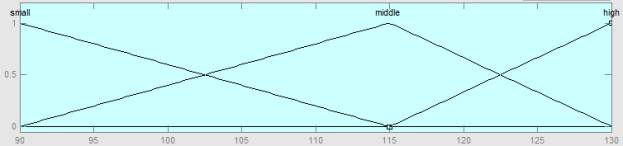
Рис.6. ЛП выхода «Ті».
Модель системы с
нечетким адаптером, а также модель стандартной АСР с общим выводом результата
работы, представлены [1, 2] на рис.7. Структура блока «Subsystem1» показана на рис.8.
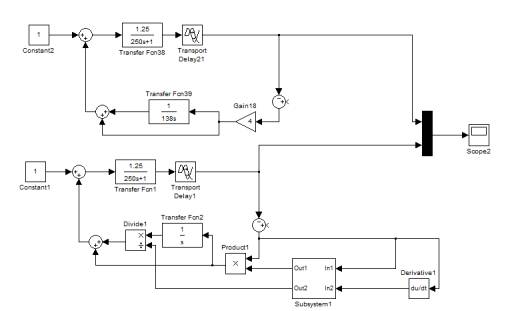
Рис.7. Моделирование стандартной АСР и
АСР с нечетким адаптером.
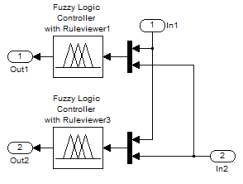
Рис.8. Структура блока «Subsystem1».
Сравнить
результаты работы системы с нечетким адаптером и стандартной системы с ПИ
регулятором можно по рис.9, а также по данным в табл.1.
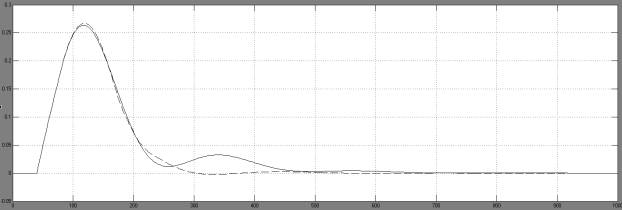
Рис.9. Переходные процессы в системе
управления с ПИ-регулятором (сплошная линия) и с нечетким адаптером (пунктирная
линия).
Таблица
1. Прямые показатели качества.
|
|
Нечеткий адаптер |
Стандартная
система |
|
Статическая ошибка
|
0 |
0 |
|
Динамическая
ошибка |
0.26 |
0.26 |
|
Степень затухания
|
1 |
0,88 |
|
Время регулирования
|
280 |
460 |
Для того, чтобы
смоделировать параметрическую непостоянность, предположим, что в спустя
некоторое время у ТОУ уменьшился коэффициент усиления на 10%. Переходные
процессы будут такими, как на рис.10.
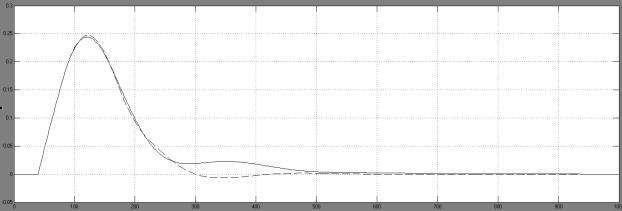
Рис.10. Переходные процессы в системе
управления с ПИ-регулятором (сплошная линия) и с нечетким адаптером (пунктирная
линия) при уменьшенном коэффициенте усиления.
Таблица
2. Прямые показатели качества.
|
|
Нечеткий адаптер |
Стандартная
система |
|
Статическая ошибка
|
0 |
0 |
|
Динамическая
ошибка |
0.245 |
0.245 |
|
Степень затухания
|
1 |
0,95 |
|
Время регулирования
|
300 |
490 |
Теперь смоделируем
ситуацию, когда постоянная времени увеличилась на 10 % (рис.11).
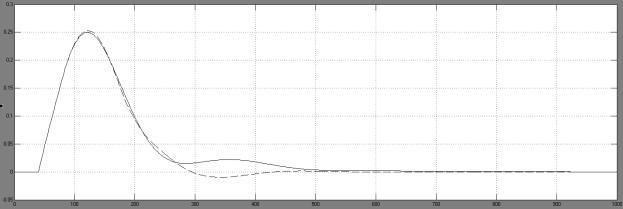
Рис.11. Переходные процессы в системе
управления с ПИ-регулятором (сплошная линия) и с нечетким адаптером (пунктирная
линия) при увеличенной постоянной времени.
Таблица
3. Прямые показатели качества.
|
|
Нечеткий адаптер |
Стандартная
система |
|
Статическая ошибка
|
0 |
0 |
|
Динамическая
ошибка |
0.25 |
0.25 |
|
Степень затухания
|
1 |
0,9 |
|
Время регулирования
|
390 |
490 |
В результате
проведенных исследований, можно утверждать, что использование системы
управления с нечетким адаптером позволяет эффективно управлять объектом с
параметрической непостоянностью. Показатели качество переходного процесса в
такой системе выше, чем при использовании стандартного ПИ-регулятора. Следует
отметить, что предлагаемый вариант настройки нечеткого адаптера является
достаточно простым. Более
детализированное исследование работы системы управления и разбиение входных и
выходных переменных на большее количество ЛП может способствовать улучшению
качества управления.
Литература:
1. Дьяконов В.П.
Simulink 5/6/7 Самоучитель. – М.:ДМК, 2008 – 781с.
2. Леоненков А. Ю.
Нечеткое моделирование в среде Matlab и fuzzyTech. - С. - Птб.: БХВ, 2003.
- 720 с.
3. Мелихов А.Н. и др.
Ситуационные советующие системы с нечеткой логикой. – М.: Наука, 1990. – 272 с.
4. Ротач В.Я., Клюев
А.С. Автоматизация настройки систем управления. М.: Энергоиздат, 1984 – 272 с.
5. Алиев Р.А.,
Церковный А.Э., Мамедова Г.А. Управление производством при нечеткой исходной
информации. М.: Энергоиздат. 1991. – 234 с.
6. Кузьменко Д.Я. Регулирование
и автоматизация паровых котлов. М.: Энергия. 1978. – 125 с.