Кадыров А.С., Ганюков А.А., Нурмаганбетов А.C.
Карагандинский государственный технический университет, Казахстан
Нагружение гладкого цилиндра при движении
в глинистом тиксотропном растворе
Основной операцией при строительстве стен подземных
сооружений, глубоких фундаментов или создание противофильтрационных завес является
выкапывание узких глубоких траншей в грунте. Для устойчивости стенок траншеи во
время отрывки грунта, траншею заполняют
глинистым тиксотропным раствором, который, находясь в покое, образует
студенистую массу – гель, а при механическом взаимодействии превращается в
вязкую жидкость – золь. При этом рабочие органы траншейной машины работают в
глинистом растворе и испытывают дополнительное давление со стороны раствора. Авторами проведены теоретические и
экспериментальные исследования нагружения и напряженно-деформированного
состояния рабочих органов бурильных и фрезерных машин при их движении в
глинистом растворе[2]. Метод установления сил сопротивления, действующих на
рабочий орган, а также напряженно-деформированного состояния рабочего органа, движущегося
в глинистом растворе, заключается в его представлении совокупностью плоских тел
и тел вращения.
В данном сообщении рассматривается модельная задача о движении гладкого цилиндра (вращательное и
сложное) радиуса R и длиной L в глинистом тиксотропном растворе.
Цилиндр приводится во вращение из состояния
покоя с угловой скоростью ![]() . При
движении цилиндра со скоростью, обуславливающей шведовский режим течения раствора [3], момент от силы
сопротивления определяется следующим выражением:
. При
движении цилиндра со скоростью, обуславливающей шведовский режим течения раствора [3], момент от силы
сопротивления определяется следующим выражением:
![]() (1)
(1)
где, 
![]() – площадь боковой
поверхности цилиндра;
– площадь боковой
поверхности цилиндра; ![]() – релаксационная вязкость;
– релаксационная вязкость; ![]() – относительная
деформация;
– относительная
деформация; ![]() – начальный условно-мгновенный модуль сдвига;
– начальный условно-мгновенный модуль сдвига; ![]() – модуль эластичности;
– модуль эластичности; ![]() – предел упругости, ниже которого остаточные
деформации не развиваются;
– предел упругости, ниже которого остаточные
деформации не развиваются; ![]() – время;
– время; ![]() – время релаксации.
– время релаксации.
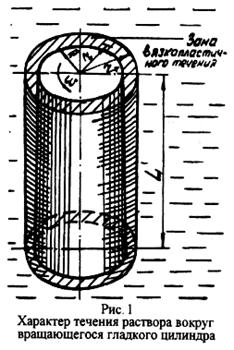 Зона течения
вязкопластичной жидкости распространяется лишь на конечное
расстояние от вращающегося цилиндра (рис.1). Остальная часть раствора будет
находиться в покое. Вокруг цилиндра образуется очень тонкий ламинарный
слой, за которым находится зона вязкопластичного течения. Радиус зоны
вязкопластичного течения и скорость движения жидкости связаны между собой
зависимостями. При радиусе векторе
Зона течения
вязкопластичной жидкости распространяется лишь на конечное
расстояние от вращающегося цилиндра (рис.1). Остальная часть раствора будет
находиться в покое. Вокруг цилиндра образуется очень тонкий ламинарный
слой, за которым находится зона вязкопластичного течения. Радиус зоны
вязкопластичного течения и скорость движения жидкости связаны между собой
зависимостями. При радиусе векторе ![]() , равном радиусу распространения зоны вязкопластичного течения
, равном радиусу распространения зоны вязкопластичного течения ![]() , скорость движения раствора равна нулю, а при равенстве значений
, скорость движения раствора равна нулю, а при равенстве значений ![]() скорость
движения раствора максимальна.
скорость
движения раствора максимальна.
Градиент
скорости сдвига по нормали:
 (2)
(2)
где ![]() – скорость движения жидкости;
– скорость движения жидкости; ![]() – предельное
напряжение сдвига;
– предельное
напряжение сдвига; ![]() – структурная вязкость.
– структурная вязкость.
Момент сопротивления вращению цилиндра в глинистом
тиксотропном растворе, при установившемся бингамовском режиме с учетом последеней зависимости
в (2), выразится
системой уравнений:
 (3)
(3)
Примем в дальнейшем максимальное
значение момента, соответствующее сумме предельного касательного
напряжения и произведения структурной вязкости на градиент скорости, с
выполнением равенства ![]() , получим:
, получим:
 (4)
(4)
В (4) момент сопротивления вращению
цилиндра при бингамовском режиме течения раствора зависит от размеров цилиндра, предельного касательного напряжения сдвига и радиуса
распространения зоны течения. Величина
радиуса ![]() является
функцией реологических характеристик раствора и угловой скорости
движения цилиндра.
является
функцией реологических характеристик раствора и угловой скорости
движения цилиндра.
При псевдоламинарном режиме течения вязкопластичная
жидкость по реологическим характеристикам адекватна вязкой жидкости с динамическим коэффициентом вязкости
![]() [3]. Вращение вязкой
жидкости отличается от вращения твердого тела тем, что
жидкость совершает динамическое вращение,
[3]. Вращение вязкой
жидкости отличается от вращения твердого тела тем, что
жидкость совершает динамическое вращение,
то есть частицы
жидкости, удаленные на различное расстояние от оси
вращения, движутся с различными угловыми
скоростями. При этом:
![]() ,
(5)
,
(5)
где ![]() – окружная скорость жидкости; С – некоторая постоянная величина.
– окружная скорость жидкости; С – некоторая постоянная величина.
Следовательно, с удалением частиц раствора от оси
вращения, их окружная скорость движения уменьшается за счет слоистого вращения и наличия трения между слоями. В
пограничном слое ![]() и
и ![]() . Градиент скорости
движения раствора:
. Градиент скорости
движения раствора: ![]() .
.
Сила трения по поверхности цилиндра с учетом
равенства значений ![]() и
и ![]() определится
выражением:
определится
выражением: ![]() , а момент от силы
сопротивления:
, а момент от силы
сопротивления: ![]() . При турбулентном режиме течения раствора момент
сопротивления его вращению:
. При турбулентном режиме течения раствора момент
сопротивления его вращению: ![]() , где
, где ![]() – касательное напряжение сдвига определяется по зависимости:
– касательное напряжение сдвига определяется по зависимости:
 (6)
(6)
Найдя градиент скорости движения раствора, получим:
![]() . (7)
. (7)
В случае сложного движения цилиндр вращается с
постоянной угловой скоростью ![]() и движется со
скоростью подачи
и движется со
скоростью подачи ![]() . Для рабочих органов землеройных машин
. Для рабочих органов землеройных машин ![]() . В связи с этим силы сопротивления трению во вращательном движении
значительно превышают силы сопротивления
трению в поступательном движении. Поэтому с большой степенью точности для расчетов можно пользоваться
зависимостями (3) и (5). В случае, если значения сравнимы со значениями
скорости подачи, то необходимо учитывать угол между переносной и относительными
скоростями.
. В связи с этим силы сопротивления трению во вращательном движении
значительно превышают силы сопротивления
трению в поступательном движении. Поэтому с большой степенью точности для расчетов можно пользоваться
зависимостями (3) и (5). В случае, если значения сравнимы со значениями
скорости подачи, то необходимо учитывать угол между переносной и относительными
скоростями.
Анализ полученных зависимостей позволяет
сделать следующие выводы: при шведовском режиме течения глинистого раствора,
сопротивление вращению цилиндра определяется упругими
свойствами геля, при бингамовском – предельным
сопротивлением сдвигу среды и размерами зоны вязкопластичного течения, при
псевдоламинарном – динамической
вязкостью раствора и скоростью его вращения.
Литература:
1. Смородинов
М.И., Б.С. Федоров, Устройство сооружений и фундаментов способом «стена в
грунте». – М.: Стройиздат, 1986. -216 с.
2. Кадыров
А.С., Кабашев Р.А. Основы нагружения фрезерных и бурильных машин. – Караганда,
КарГТУ, 1999. – 124с.
3. Огибалов
П.М., Мирзаджанзаде А.Х. Нестационарное движение вязкопластичных сред. – М.:
МГУ, 1970. – 415с.