Момот В.Е.
Криворожский
технический университет
Бутенко
В.И., Ермак В.В.
Национальная
металлургическая академия Украины
Иcследование статических
режимов асинхронного двигателя с частотным регулированием в среде MathLab
При изучении процессов, происходящих в сложных
электромехани-
ческих
системах, в большинстве случаев возникает необходимость в разработке
статических и динамических моделей, адекватно отражающих реальное состояние
этих систем.
Наиболее сложным элементом с точки зрения
математического описания является асинхронный двигатель (АД). Являясь
нелинейным звеном и выступая в качестве объекта регулирования или управления
при автоматизации процессов производства, АД требует определения как
статических, так и динамических параметров и характеристик.
В связи с этим возникает необходимость в
разработке доступных программных средств, которые не требовали бы специальной
подготовки в области программирования, и одновременно давали бы возможность
проводить исследования асинхронных двигателей во всех режимах работы.
В настоящей работе решены задачи практического
использования ППП MathLab 6.5 для исследования статических режимов
АД с применением визуальных объектов из
библиотеки Simulink, что позволяет получить визуализацию как
промежуточных результатов так и конечных графических зависимостей.
Для подъёмно-транспортных механизмов, таких как
лифты, краны и др. актуальна задача исследования статических характеристик в
двигательном, генераторном и режиме противовключения с глубоким диапазоном
регулирования по системе ТПЧ-АД.
При
частотном регулировании электромагнитный момент двигателя определяется из
выражения [1]:
 (1)
(1)
где приняты следующие обозначения:
![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
![]() - относительная частота статора;
- относительная частота статора; ![]() - относительное напряжение на статоре;
- относительное напряжение на статоре; ![]() – конструктивная
постоянная фазной обмотки статора двигателя; m1 – число фаз статора;
– конструктивная
постоянная фазной обмотки статора двигателя; m1 – число фаз статора; ![]() .
.
τ = τ1 +
τ2 + τ1τ2 – общий коэффициент рассеяния, для
статора и ротора соответственно равны:
 и
и  .
.
Индуктивные сопротивления
хо,
x1, x'2 соответствуют
номинальной частоте.
Параметр абсолютного скольжения β используется вместо скольжения s и связан с ним соотношением:
![]() .
.
Когда регулирование
производится при напряжении, зависящем только от частоты и не зависящем от
нагрузки β, то максимальный момент равен:
 .
(2)
.
(2)
Анализ выражения (2)
показывает, что при сравнительно больших частотах, когда значением r1
по сравнению с хк = х1 + х2 можно
пренебречь, максимальный момент двигателя при изменении частоты постоянен МКα=const,
если напряжение изменяется пропорционально частоте, т. е. γ=α или
![]() .
.
Известно, что
при снижении частоты активное сопротивление статора r1 становится
соизмеримым со значением хк и
максимум момента двигателя снижается. Для поддержания максимального момента
двигателя и его перегрузочной способности при снижении частоты во всём
диапазоне регулирования необходимо при малых частотах уменьшать напряжение в
меньшей степени, чем снижается частота.
Приравняв
единице отношение максимального момента при номинальной частоте к максимальному
моменту для любой частоты, получим закон регулирования напряжения, когда
максимальный момент двигателя сохраняется:
 . (3)
. (3)
В основу составления математической модели положена программа Simulink из среды MATLAB 6.5, с
использованием различных вычислительных блоков библиотеки Math Operation. Независимую
переменную логично задать в виде сигнала, изменяющегося по требуемому закону,
выбранному из библиотеки Sources.
В нашем случае независимая переменная относительного скольжения β представлена блоком Ramp в
виде линейно изменяющегося сигнала от 0 до 1. Регистрация результатов
вычисления производится блоком Scope
из библиотеки Sinks.
Расчет механических характеристик произведен в относительных единицах.
На рис.1 приведена модель электромагнитного момента, составленная по
выражению (1) для одной частоты (α
= 0,75) при γ = α.
Представляет интерес
организация перехода от двигательного к генераторному режиму, осуществляемая в
модели с помощью переключателя Switch из библиотеки Simulink.
Переход от двигательного
режима в генераторный переходит в момент, когда скольжение βi, при относительной частоте αi, становится равным β0i, т.е. идеальному холостому ходу. Уставка блока
Switch должна соответствовать скольжению β0i,
при заданной частоте αi.
Во время перехода развиваемый двигателем момент становится равным «0» и
происходит переключение Switch из одного положения в другое.
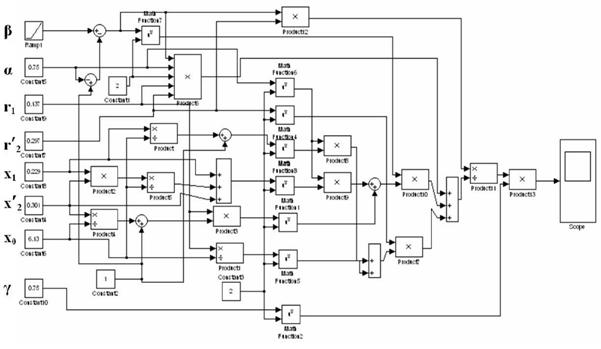
Рис.1.
Математическая модель электромагнитного момента
Величина
относительного скольжения β
устанавливается временем моделирования в подменю Simulation parameters из меню Simulation.
Модель
для расчета семейства механических характеристик с учётом коррекции по напряжению
при γ(α) для двигательного, генераторного и режима
противовключения представлена на рис.2.
Графики зависимостей М=f(β) для
различных частот (α1,
α2 , …, α7) представлены на рис.3.
Как видно из графиков три режима работы соответствуют
значениям β
от 0 до 1 – генераторному; от 1 до 2 – двигательному; от 2 до
3 – противо-включения.
Таким образом разработанные модели позволяют получить
визуализацию как промежуточных так и конечных результатов статических
характеристик ![]() (β),
(β), ![]() (β),
(β), ![]() (β),
(β), ![]() (β), более реалистично
отражающих статические режимы АД, и могут применяться для
практических целей при наладке электропривода, а также в учебном процессе при
проектировании.
(β), более реалистично
отражающих статические режимы АД, и могут применяться для
практических целей при наладке электропривода, а также в учебном процессе при
проектировании.
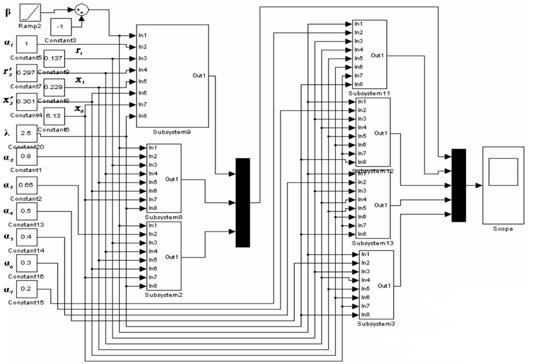
Рис.2.
Модель расчета механических характеристик для двигательного, генераторного
и режима противовключения
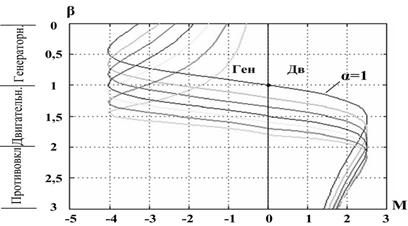
Рис.3.
Семейство механических характеристик для различных режимов работы АД
Литература:
1.Сандлер А.С. и Сарбатов Р.С. Автоматическое
частотное управление
асинхронными двигателями.
М., «Энергия», 1974.
2. Гультяев А.К. Matlab 5.3 Имитационное
моделирование в среде
Windows.Практическое пособие. – СПБ.: КОРОНА принт,
2001. – 400с.
3.Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых
систем в Matlab
6.0. Учебное пособие. – СПБ.: КОРОНА принт, 2001. – 320 с.,пл.