Божок А. М., Кримський В. П. Секція
«Технічні науки»
підсекція «Транспорт»
Подільський державний
аграрно-технічний
університет
СИСТЕМА АВТОМАТИЧНОГО
ПІДРЕСОРЮВАННЯ СИДІННЯ ТРАНСПОРТНИХ ЗАСОБІВ
Одним з найбільш ефективних методів гасіння коливань
сидіння транспортних засобів (ТЗ) є комбіноване регулювання, забезпечуючи реалізацію
умови інваріантності положення сидіння
від зовнішнього збурення [1]. Відома система автоматичного підресорювання (САП)
сидіння (а. с. СРСР №1237496 та ін.) ТЗ виконана за принципом комбінованого
регулювання. Однак недоліком її є складність конструкції, спричинена залученням
двох виконавчих гідроциліндрів (ГЦ), що збільшує
матеріалоємність, створює певні незручності при проведенні
монтажно-демонтажних, настроювальних і обслуговуючих
робіт. У зв’язку з цим запропонована конструктивно нова САП сидіння ТЗ, що
містить (Рис.1а) штатну підвіску з опорним колесом I, дистанційну замкнену гідропередачу II, блок компенсацій з перетворювачем
сигналів III, підсумовував збурюючих і компенсаційних
сингалів з сидінням IV.
При різкому
підйомі опорного колеса 3, виникнуте збурення
через вісь 2, пружний елемент 4 і гідроамортизатор
штатної підвіски, раму 1, корпус 19 і поршень 18 компенсаційного блоку, а також
пружина 12, намагаються діяти на підсумовуючий елемент 14, щоб перемістити його
на певну, пропорційно збуренню величини догори. Але в результаті зближення рами
1 і вісі 2, тяга 6 перемістить шток 7гідроциліндра 8 теж догори. При цьому в
його безштоковій порожнині тиск робочої рідини різко
зменшиться на величину пропорційну збуренню, і робоча рідина під дією пружини
12, на шток 17 із порожнини 20 через регульований дросель 21 і гідролінію 9
буде перетікати в нею порівняно повільніше а ніж, під дією тієї ж пружини 12,
із безштокової порожнини 10 поршня 18 через гідролінії
9,11.
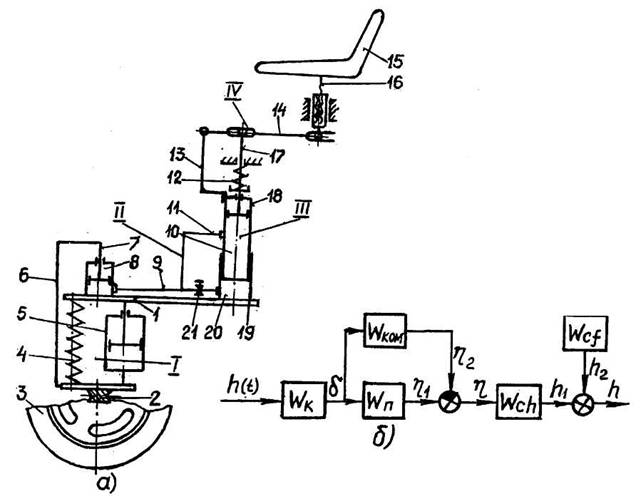
Рис. 1 Схема
системи автоматичного підресорювання сидіння транспортного засобу:
а) – принципіальна; б) – структурна
Від цього шток 17 і зв’язана з ним середня частина підсумовуючого елемента
14 буде швидше опускатися аніж поршень 18 і зв’язаним з ним через тягу 13 один
кінець підсумовуючого елемента 14, що забезпечить останньому можливість
повертатись навколо його середньої точки. В даному випадку переміщення другого
кінця елемента 14, а разом з ним і сидіння 15 буде складатися з двох переміщень
– переміщення, обумовленого опусканням штока 17, яке пропорційне зовнішньому
збуренню, і переміщення, спричиненого опусканням поршня 18 з тягою 17, яке
пропорційне швидкості (першій похідній) змінювання збурення і настроювання
регульованого дроселя 21. Отже, можливе переміщення догори важільного
підсумовуючого елемента 14 і зв’язаного з ним сидіння 15, від різкого збурення
збоку рельєфу на опорні колеса 3, буде компенсуватися двома сигналами –
сигналом, пропорційним величині змінювання збурення і сигналом, пропорційним
швидкості його змінювання. І чим різче буде діяти збурення, тим більшою за величиною
буде складова компенсуючого сигналу, пропорційна
швидкості його змінювання, і тим буде вищою ефективністю автоматичного гасіння
коливань сидіння.
При різкому провалі опорного колеса 3 відбувається
зворотний цикл переміщення рухомих деталей і робочої рідини САП, що обумовить зворотнє переміщення одного кінця і середньої частини підсумовуючого елемента
14 і забезпечить цим автоматичну компенсацію можливого переміщення вже донизу,
другого його кінця і зв’язаного з ним сидіння 15.
У випадку повільного підйому або опускання опорного
колеса 3 або віддалення рами 1 і вісі 2 та переміщення тяги 6, штока 7 буде
також повільне, що спричинить повільне змінювання тиску робочої рідини в безштоковій порожнині гідроциліндра
8 і навпаки буде перетікати практично з однаковою швидкістю. Останнє дасть
можливість штоку 17 і тязі 13 також переміщуватися з однаковою швидкістю, а
зв’язаному з ними важільному підсумовуючому елементу 14 - паралельно
початковому положенню. В цьому випадку компенсація можливого переміщення
підсумовуючого елемента 14 і зв’язаного з ним сидіння 15 буде здійснюватися
тільки одним сигналом – пропорційним величині зовнішнього збурення.
Таким чином, положення, що займає сидіння 15 до і
після дії будь-якого за знаком і характером зовнішнього збурення на всі і
окремо на кожне колесо транспортного засобу, змінюватись не буде.
Ступінь автоматичної компенсації відхилення сидіння
сигналами пропорційними швидкості змінювання зовнішнього збурення в залежності
від ваги водія і характеру збурення можна регулювати дроселем 21 окремо для
кожного окремого колеса. Висота розміщення сидіння 15 в залежності від росту
водія регулюється гвинтовим механізмом 16.
За принципіальною буда розроблена, необхідна для дослідження,
структурна схема САП сидіння (Рис. 1б) [2]. На схемі представлені передаточні
функції основних ланок системи: сидіння, як об’єкта регулювання, по каналу дії
зовнішнього збурення – Wch і дії
водія – Wcƒ;
опорного колеса Т3-Wk;
штатної підвіски – Wn і
обвідного компенсаційного контура - Wком.
Входом САП є зовнішнє збурення з боку рельєфу поверхні дороги - h(t) і дії з боку
водія - ƒ(t), а виходом – переміщення сидіння – h.
Динамічні ланки системи зв’язані безрозмірними координатами зв’язку: б – відхилення
опорного колеса від положення усталеного стану;ɳ ,ɳ 1, ɳ2 – відповідно сигнали діючі на сидіння –
результативний, збурюючі і компенсаційні; h, h1, h2 –
переміщення сидіння відповідно результативне, по каналу дії зовнішнього збурення і водія.
Структурна схема використовується для подальшого
дослідження статичних і динамічних показників функціонування запропонованої САП сидіння ТЗ. Використання системи на сучасних ТЗ при
спрощеній конструкції і зменшенні матеріалоємності полегшить виконання монтажно-демонтажних робіт та її
обслуговування.
ЛІТЕРАТУРА
1. Менский Б. М. Принцип инвариантности
в автоматическом регулировании и управлении. – М.:Машиностроение,1972. – 248с.
2.Бесекерский
В. А., Попов Е. П. Теория систем автоматического регулирования. 2-е изд. исправ. и доп. – М.: Наука, 1972. – 768 с.
Автори:
А. М. Божок В.П.
Кримський
ВІДОМОСТІ ПРО АВТОРІВ:
Божок Аркадій Михайлович, в. о. доцента Подільського
державного аграрно-технічного університету.
Домашня адреса:
Домашній телефон: 4-57-92
Кримський Володимир Павлович, старший викладач
Військового інженерного інституту Подільського державного аграрно-технічного
університету.
Домашня адреса: